Motor position servo system self-adaptive control method based on interference observer
A disturbance observer, adaptive control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0152] In order to verify the performance of the designed controller, the following parameters are taken in the simulation to model the motor position servo system:
[0153] Inertia load parameter m = 10kg m 2 ; Coefficient of viscous friction B = 1N m s / rad; Moment magnification factor k i =10N·m / V;
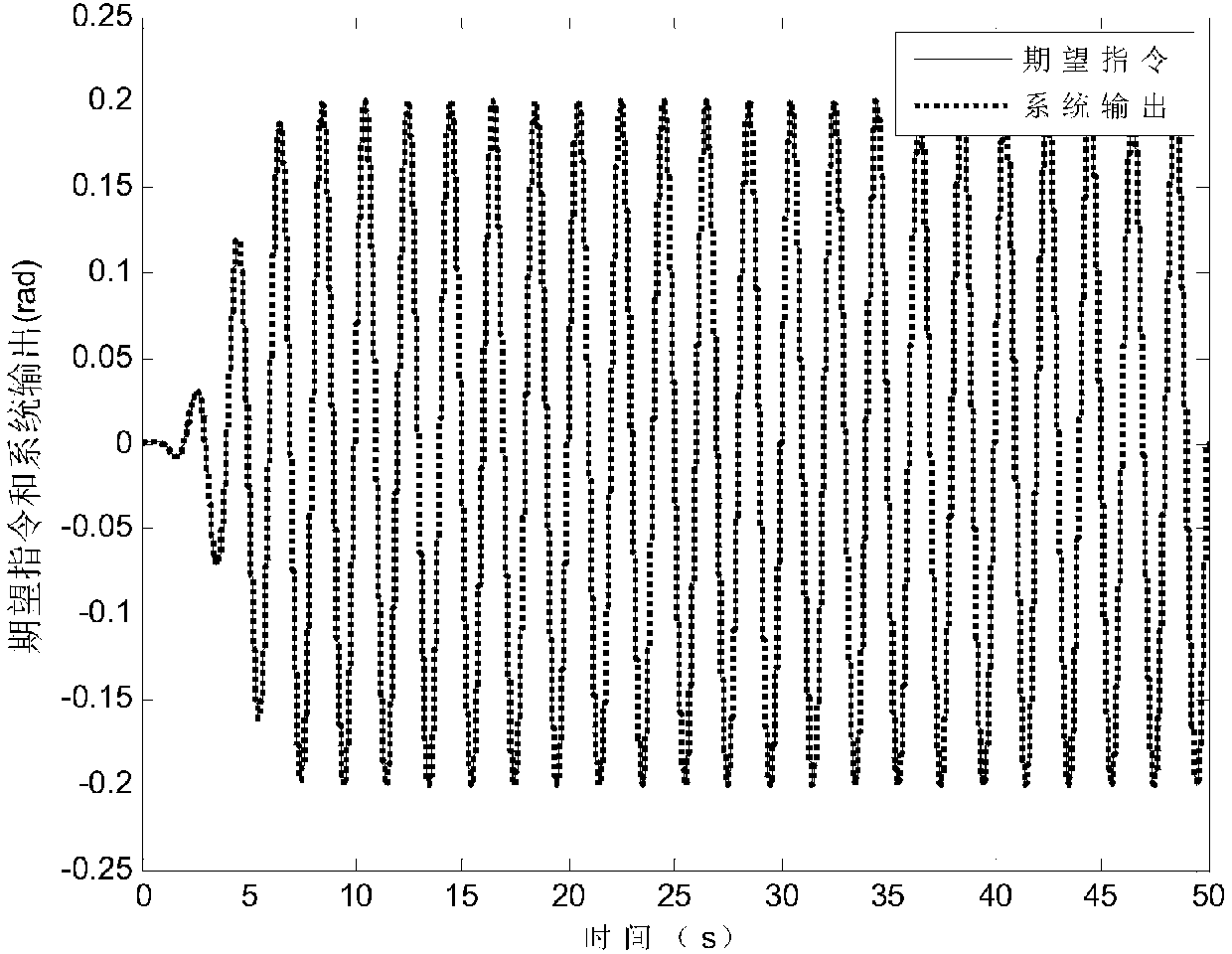
[0154] The desired instruction for a given system is x 1d =0.2sin(t)[1-exp(-0.01t 3 )] (rad).
[0155] Take the following controller for comparison:
[0156] Disturbance observer based adaptive (DAC) controller: take the controller parameter k 1 =10,k 2 =10; adjust the gain l 1 =40,l 2 =1000, l 3 = 3, α = 0.2, β 1 =100,β 2 =0.1, self-regulating law gain Γ=diag{700,7000}; θ min =[0.4,0.02] T , θ max =[3,1] T ,
[0157] Active Disturbance Rejection Adaptive (ADRAC) Controller: Considering the ADRAC controller is to compare and verify that in the presence of time-varying disturbances, the ADRAC controller can only make the system reach bounded stability, while the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com