UUV (unmanned underwater vehicle) dynamic planning method based on LSTM-RNN (long short term memory-recurrent neural network)
A technology of dynamic planning and ant colony algorithm, applied in the field of unmanned underwater vehicles, can solve problems such as the contradiction between the accuracy and the real-time path optimization degree of the environmental model.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0105] Further describe the present invention below in conjunction with accompanying drawing:
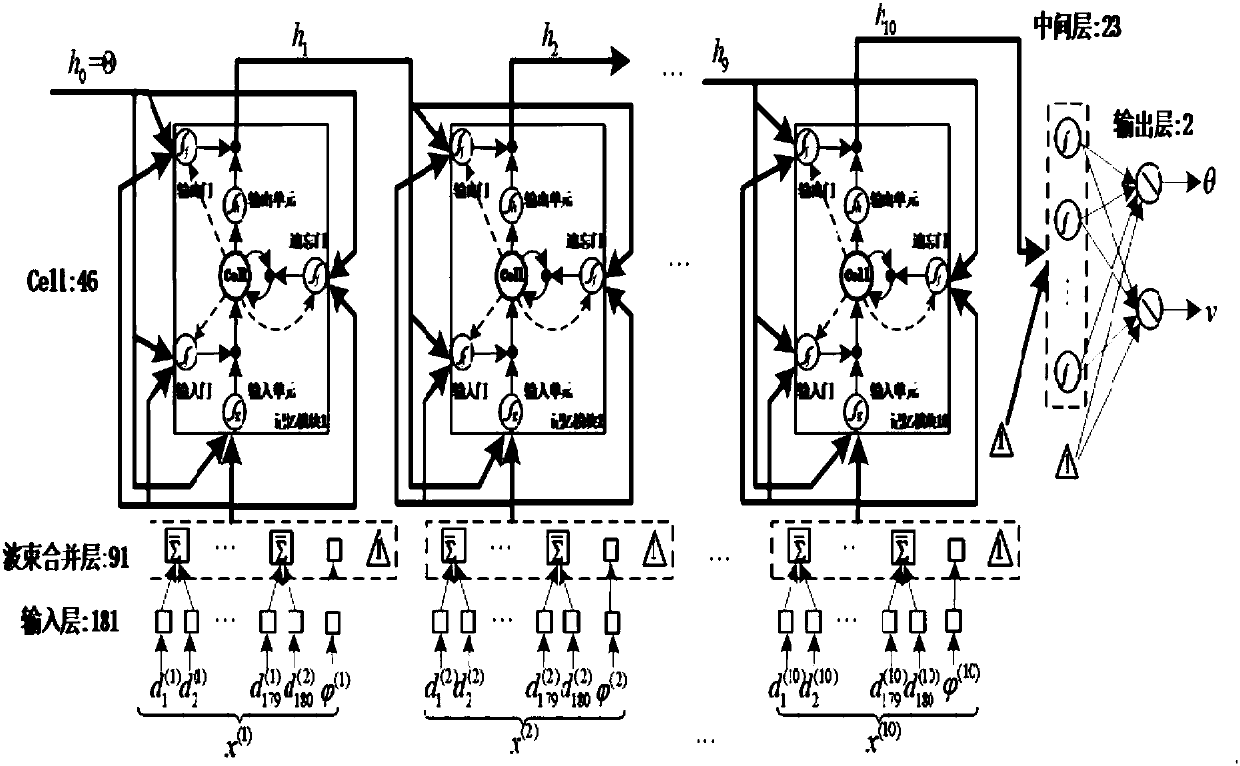
[0106] A UUV dynamic programming method based on LSTM-RNN, comprising the following steps:
[0107] Step (1): Select the geometric model to construct the obstacle environment model:
[0108] For the two-dimensional geometric model, following the principle of "using the least amount of data and describing the most complete information", the obstacles are divided into two types: elliptical or circular obstacles and polygonal obstacles.
[0109] For elliptical or circular obstacles, store the coordinates of two diagonal points of elliptical or circular obstacles, and use these two point coordinates to calculate the center of the ellipse and the long and short radii to obtain all information about elliptical or circular obstacles.
[0110] For polygonal obstacles, the coordinates of the polygonal vertices are stored. Starting from any vertex, the polygonal vertices are stored in a sequ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com