Visual anti-collision control method for industrial robot arm
An industrial robot and visual anti-collision technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as limited vision of manipulators, mistakes and safety accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0066] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
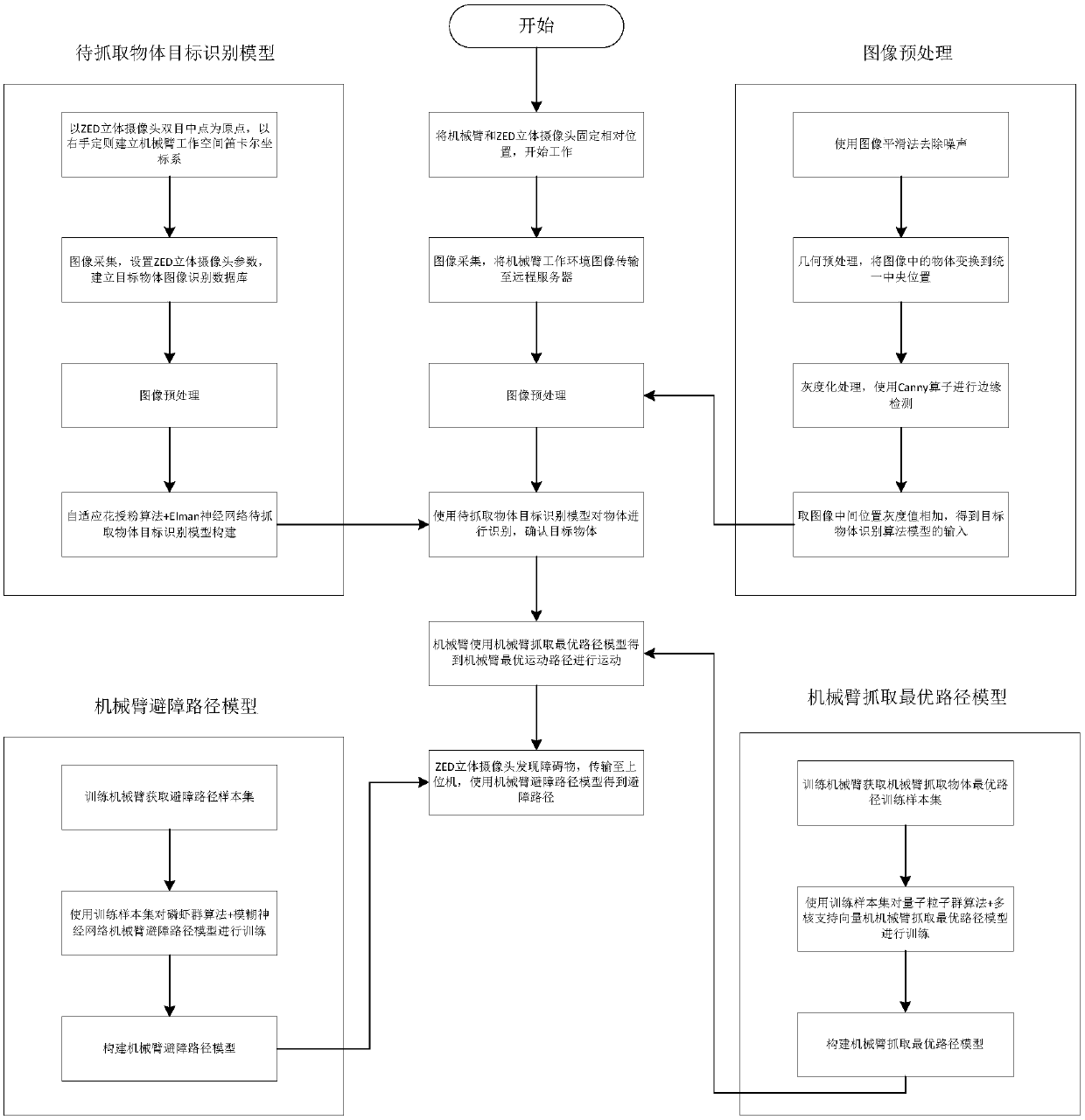
[0067] like figure 1 Shown, a kind of industrial robot arm visual anti-collision manipulation method comprises the following steps:
[0068] Step 1: Construct the three-dimensional coordinate system of the working space where the manipulator is located;
[0069] Use the image acquisition area to cover the entire working space of the robot arm to grab the target object. The midpoint of the line connecting the left and right cameras of the binocular ZED camera is taken as the origin, and the line connecting the center of the right camera of the binocular ZED to the center of the left camera of the binocular ZED is the positive y-axis. According to the right-hand rule, the three-dimensional coordinate system of the working space of the manipulator is established;
[0070] Step 2: Construct the target recognition model of the object to be grasped based on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com