Micro-gyroscope fractional order self-adaptive fuzzy neural inversion terminal sliding mode control method
An adaptive fuzzy, terminal sliding mode technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of poor system parameter and angular velocity estimation effect, poor tracking effect of micro gyroscope, and easy to be affected by external environment. impact, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be further described in detail below through the specific examples, the following examples are only descriptive, not restrictive, and cannot limit the protection scope of the present invention with this.
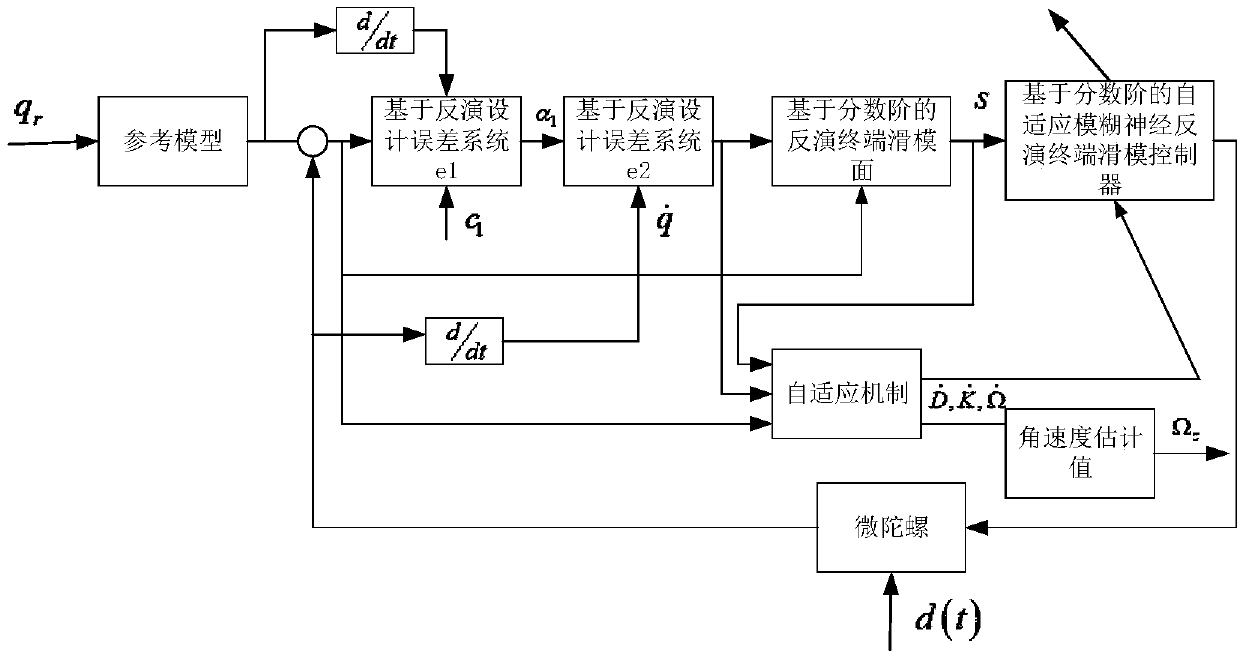
[0082] Such as figure 1 As shown, the micro-gyroscope fractional-order adaptive fuzzy neural inversion terminal sliding mode control method includes the following steps:
[0083] 1. Establishment of the dimensionless dynamic equation mathematical model of the micro-gyroscope system
[0084] A general micromechanical vibrating gyroscope consists of three parts: a suspended mass supported by an elastic material, an electrostatic drive device, and a sensing device. It is simplified as a damped oscillation system composed of a mass block and a spring. For the z-axis micro-gyroscope, it can be considered that the mass block is restricted to move only in the x-y plane, but not along the z-axis, and only rotates around the z-axis.
[0085] Accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com