A seven-degree-of-freedom active and passive manipulator that can simultaneously lock multiple joints
A technology of robotic arms and degrees of freedom, applied in the field of robotic arms, can solve the problems of slow positioning speed, laborious robotic arms, and not very large working space, and achieve the effects of large working space, fast positioning and locking, and simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment
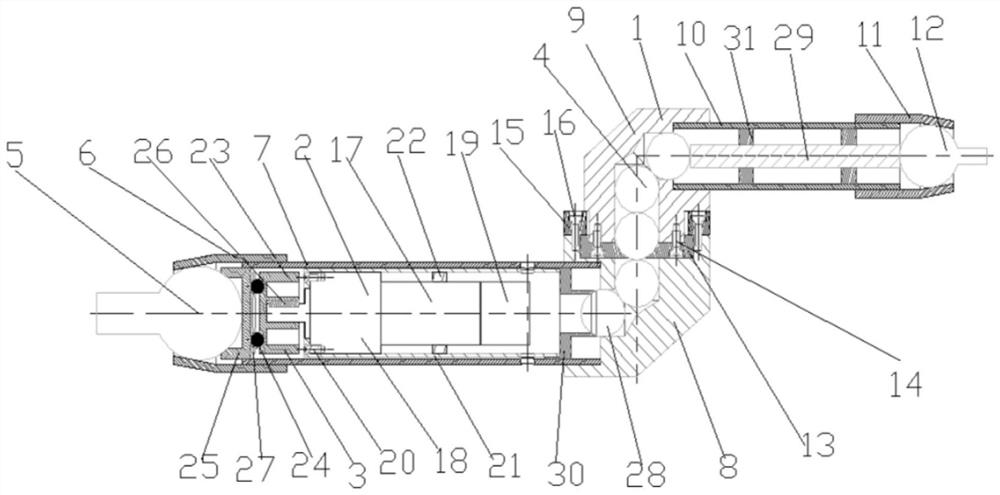
[0024] Depend on figure 1 , figure 2 , Figure 3a , Figure 3b It shows a seven-degree-of-freedom active and passive manipulator that can simultaneously lock multiple joints, mainly composed of the external connection mechanism of the manipulator, the motor drive system (2), the cam mechanism (3), and the steel ball transmission mechanism (4) .
[0025] The external connection mechanism (1) of the mechanical arm is composed of kinematic joints (5, 8, 9, 12), connecting rods (7, 10) and components thereof. The proximal ball joint (5) built into the proximal cup (6) is connected to the lower half of the middle rotary joint (8) through the proximal connecting rod; the distal ball joint (12) built into the distal cup (11) passes through the far The end link is connected with the upper part (9) of the middle revolving joint; the small brake disc (13) is placed in the lower part (8) of the revolving joint, and is connected with the upper part (9) of the middle revolving joint t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com