


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
MRK system and method for controlling an MRK system
A technology of control devices and end effectors, applied in the direction of program control, general control systems, control/regulation systems, etc., can solve problems such as limiting the range of use of manipulators, limited working range of manipulators, and huge computing expenses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
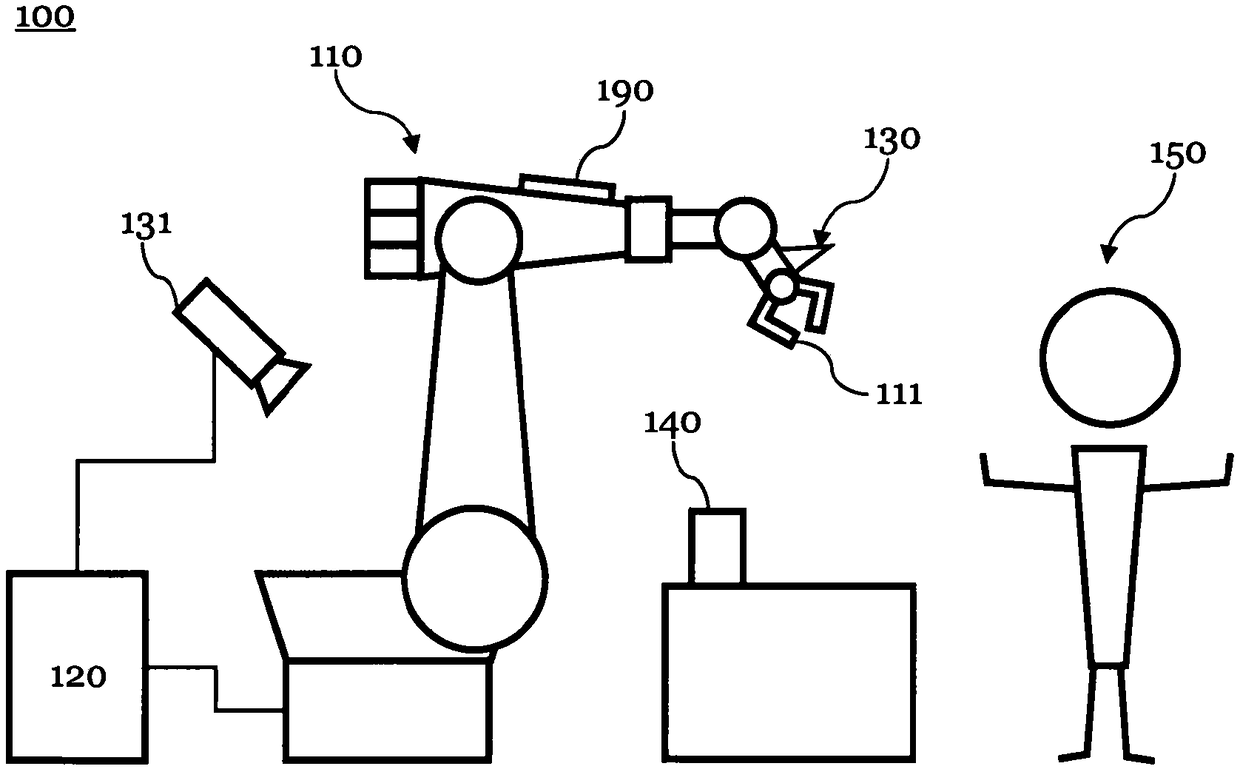
[0045] especially, figure 1 Shown is an MRK system 100 comprising a manipulator 110 embodied as an industrial robot with at least three freely programmable axes of motion. Manipulator 110 guides end effector 111, which isfigure 1 The illustration in is the gripper. To this end, the gripper 111 is provided for grasping or manipulating an object 140 . In particular, the manipulator 110 is an MRK-capable manipulator such that collaboration between the manipulator 110 and the person 150 is possible.
[0046] For example, manipulator 110 may be configured to grasp and transport object 140 by means of end effector 111 . In the MRK system, a person 150 can, for example, take over the task of fine positioning the grasped object 140 so that the assembly steps are carried out correctly or carry out further, preferably auxiliary, tasks alongside the robot.
[0047] In particular, the end effector 111 can be provided with a sensor 130 or a plurality of sensors 130 which enable the dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com