Multi-robot path dynamic planning method
A dynamic planning and multi-robot technology, applied in the direction of instrumentation, non-electric variable control, vehicle position/route/height control, etc., can solve the problem of large amount of calculation, unable to dynamically adjust the route, unable to solve multi-robot path planning and dynamic adjustment, etc. problem, to achieve the effect of small calculation and reliable and fast planning algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, wherein the schematic embodiments and descriptions are only used to explain the present invention, but are not intended to limit the present invention.
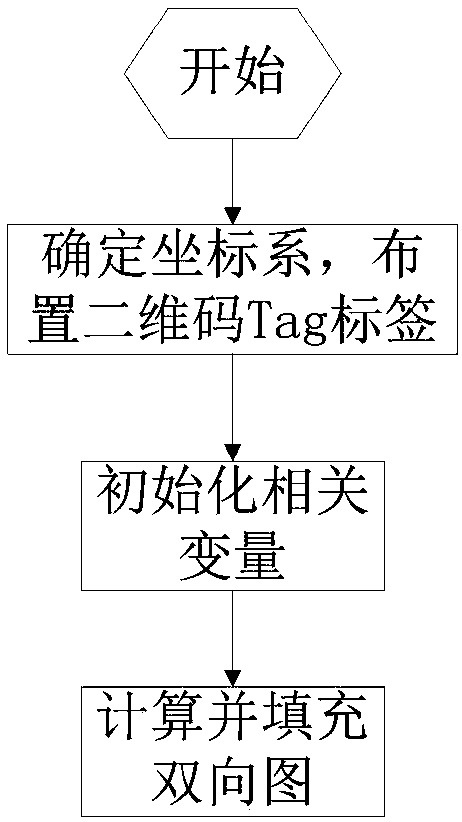
[0030] See attached figure 1 , is a kind of multi-robot path dynamic planning method applied in the present invention, and the method comprises the following steps:
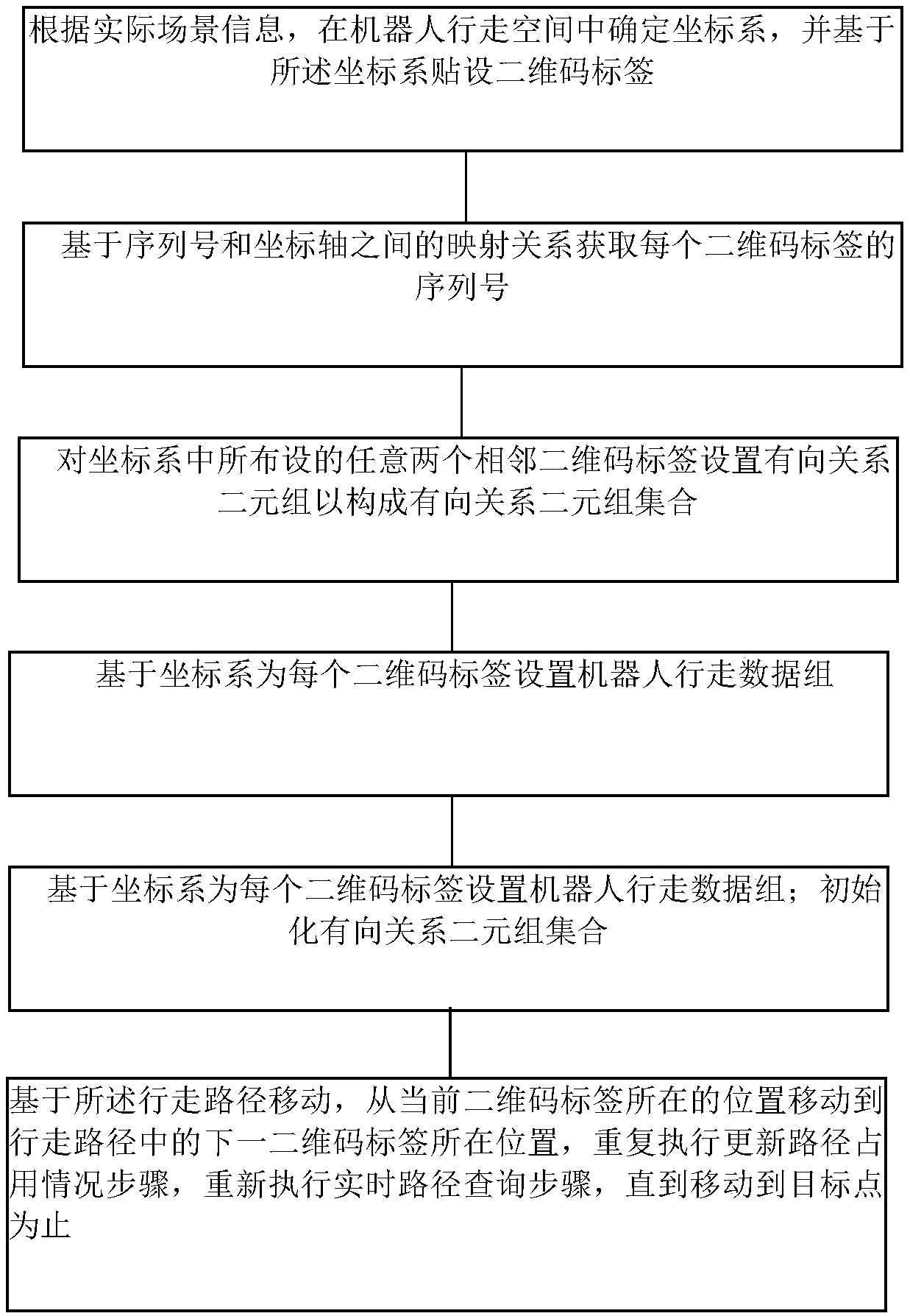
[0031] Step (1): According to the actual scene information, determine the coordinate system in the walking space of the robot, and paste a two-dimensional code label in the walking space based on the coordinate system;
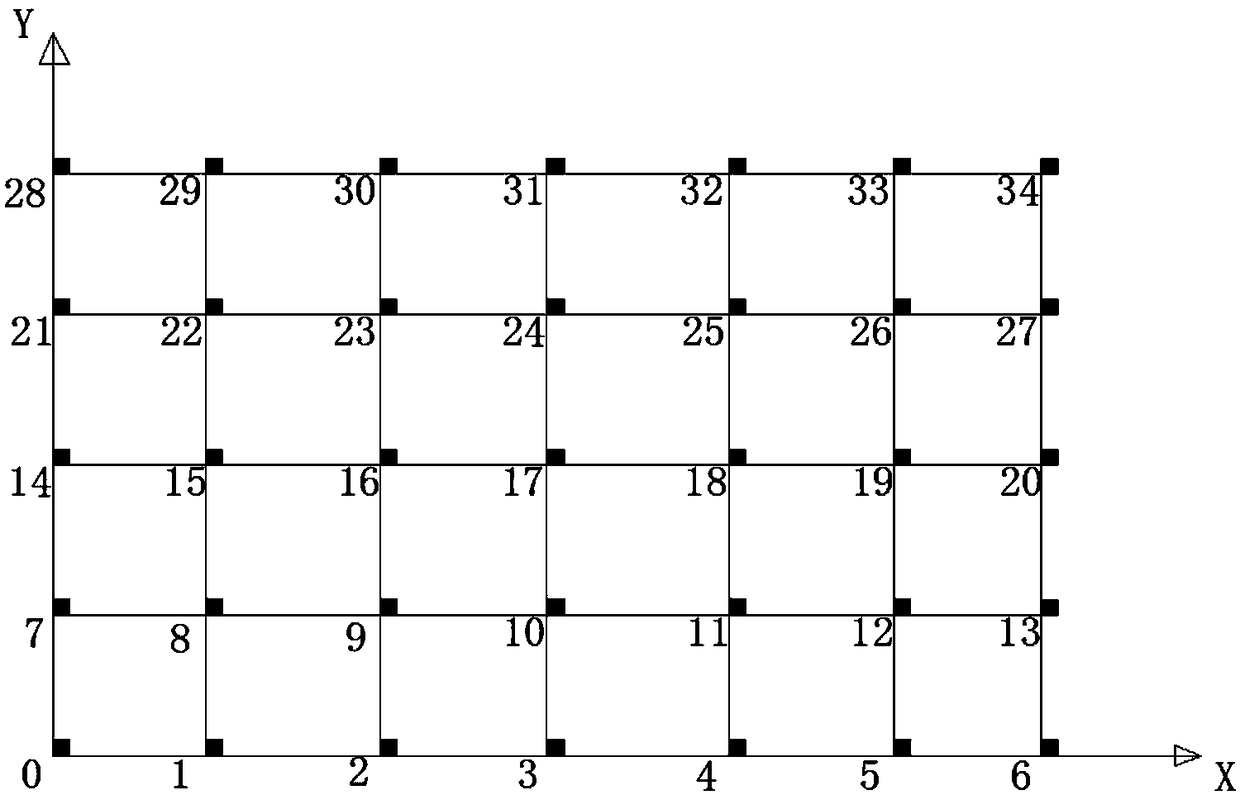
[0032] The affixing of labels in the walking space based on the coordinate system is specifically: affixing a two-dimensional code label in each unit space in the first quadrant of the coordinate system; affixing a two-dimensional code label on the ground where the robot walks label; the robot determines the wal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com