Vehicle over-limit detection system and method
A detection system and detection method technology, applied in the field of vehicle overrun detection system, can solve the problems affecting the promotion and engineering application of the system, lack of on-site evidence collection, and difficulty in law enforcement personnel, so as to adapt to harsh natural environments, avoid weighing errors, reduce effect of difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0033] First introduce the road vehicle overrun detection system of the present embodiment, such as figure 1 As shown, it includes a rear gantry, a middle gantry, and a front gantry arranged sequentially at intervals of one end along the driving direction of the lane. Each of these three gantry frames is about 6 meters high, and the distance between any two is about 20 to 30 meters. Three gantries span N lanes at the same time, and the value of N is determined by the number of lanes to be measured on the highway. The road vehicle overrun detection system also includes a control cabinet, an image acquisition device, a laser scanning device installed on the middle gantry, and a piezoelectric weighing device pre-installed in the driveway. The control cabinet is respectively connected with the image acquisition device, laser scanning device and piezoelectric weighing equipment through LAN or RS485 communication, receives the data information of the communication connection betwee...
Embodiment 2
[0050] For the technical subject of measuring vehicle speed and attributes of length, width and height by laser radar, the second embodiment preferably adopts the following method to calculate the speed of the vehicle driving in the lane on the basis of the first embodiment.
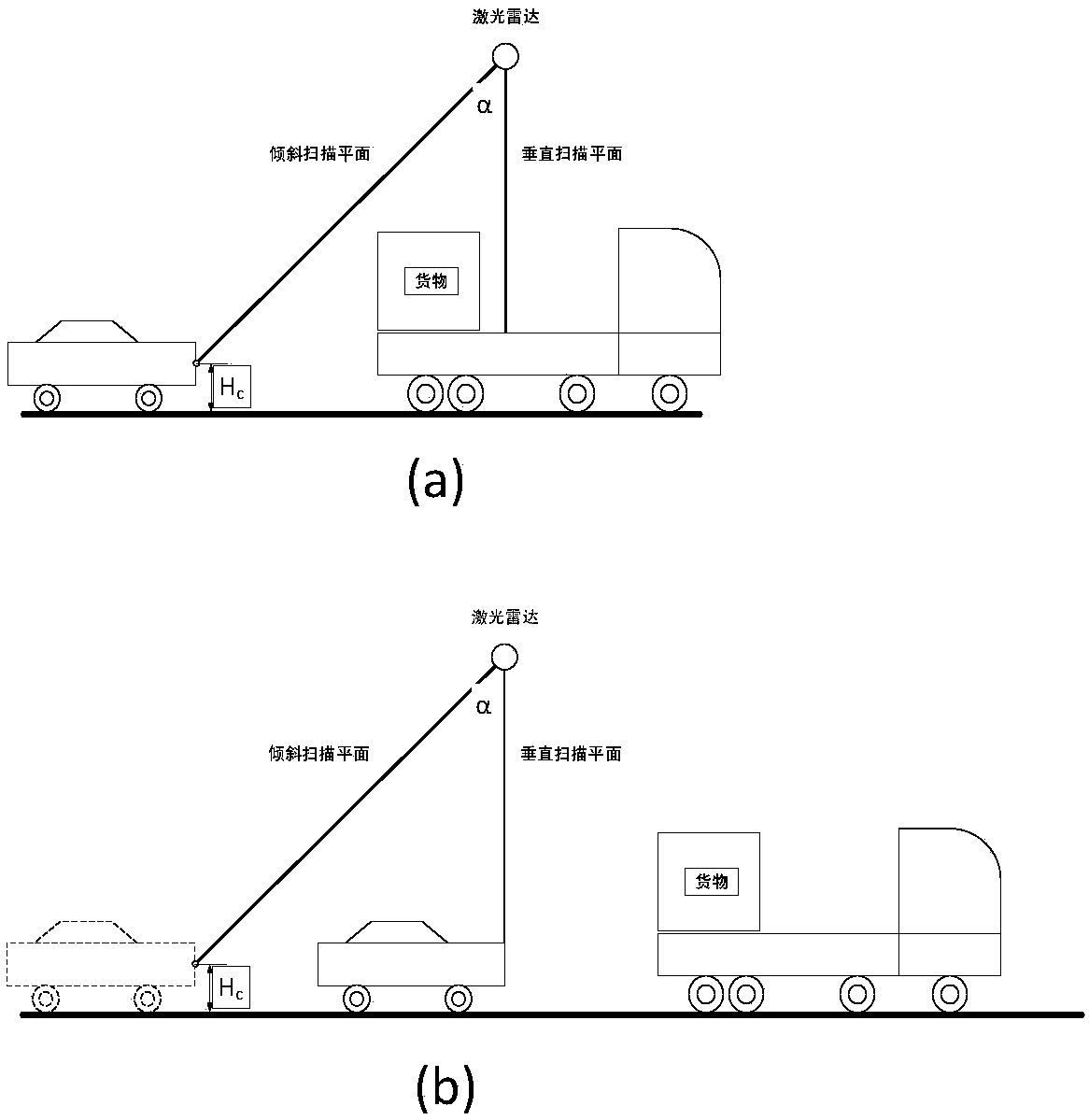
[0051] Such as figure 2 As shown, since the vertical laser plane and the inclined laser plane are close to the ground, it can be approximately considered that the vehicle passes through the two laser planes at a constant speed. Here it is not required that the speeds of the front and rear cars are the same, that is, the distance between two different cars can gradually approach or gradually move away. For the front and rear cars passing through the laser plane process in turn, if there is a situation where the front car blocks the rear car, it often poses greater difficulties and challenges to the measurement of the rear car speed. Obviously, for the inclined scanning plane, if the height of the front ...
Embodiment 3
[0069] Embodiment 3 On the basis of Embodiment 1, the layout of piezoelectric weighing equipment is optimized. Two rows of cross-configured piezoelectric weighing devices are embedded and deployed on the driveway, under the middle gantry and in front of the first laser radar scanning plane. When the wheel is pressed against the surface of the weighing device, a corresponding pressure signal will be generated, and the overall weight of the vehicle can be calculated by processing the pressure signal.
[0070] The reasons for deploying the weighing equipment in the rear row before the intersection of the laser plane and the lane plane are as follows: record the time when the front of the car triggers laser scanning as T1, the time when the front wheels press the weighing equipment is T2, and the time when the rear wheels press the weighing equipment is T2. The moment of heavy equipment is T3, and the moment of the end of laser scanning is T4. Since the wheels are behind the fron...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com