Disparity-map-based real-time vehicle tracking and detection method and device
A technology for vehicle tracking and detection methods, applied in image analysis, image data processing, instruments, etc., can solve the problems of accuracy, real-time performance and stability being difficult to take into account at the same time, so as to ensure accuracy and stability and save time. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0031] see figure 1 As shown, a lane line detection method based on morphological reconstruction includes:
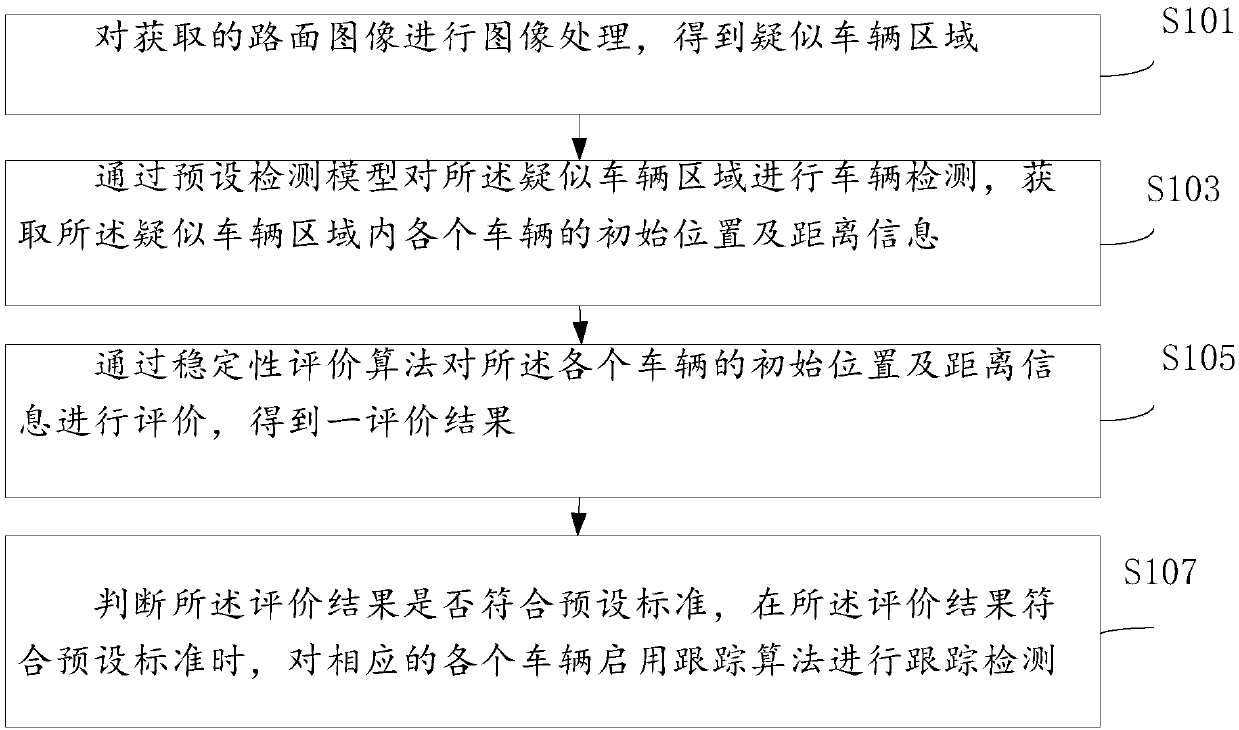
[0032] S101: Perform image processing on the acquired road surface image to obtain a suspected vehicle area;
[0033] S103: Perform vehicle detection on the suspected vehicle area by using a preset detection model, and obtain initial position and distance information of each vehicle in the suspected vehicle area;
[0034] S105: Evaluate the initial position and distance information of each vehicle through a stability evaluation algorithm, and obtain an evaluation result;
[0035] S107: Judging whether the evaluation result meets the preset standard, and when the evaluation result meets the preset standard, activate the tracking algorithm for each corresponding vehicle to perform tracking detection.
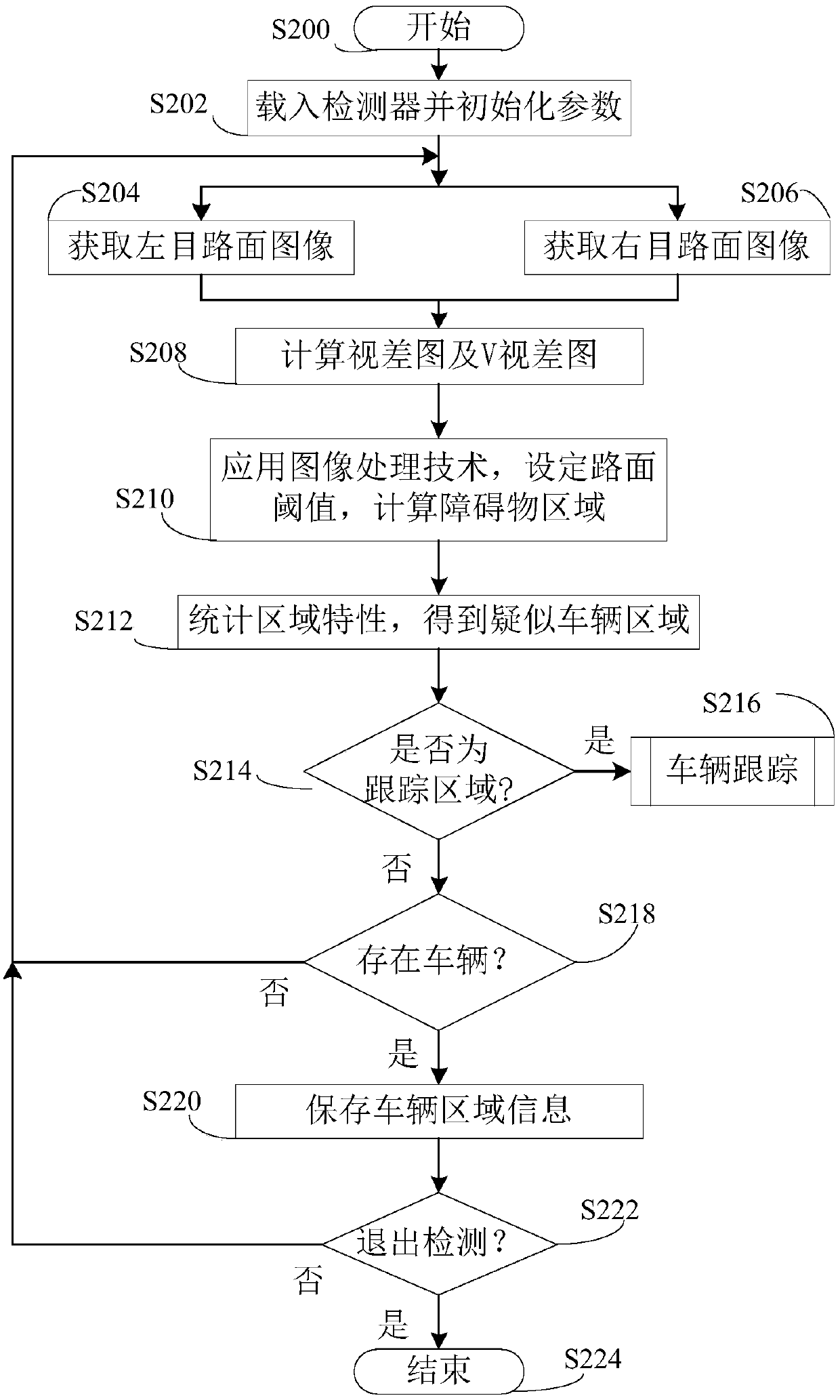
[0036] Specifically, before performing step S101, first initialize the vehicle detector and load the preset detection model; wherein, the vehicle detector has a built-in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com