Buoyancy regulating system for micro underwater robot
An underwater robot and buoyancy adjustment technology, which is applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problems of complicated adjustment methods, unsuitable for micro-sized underwater robots, and large space occupation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
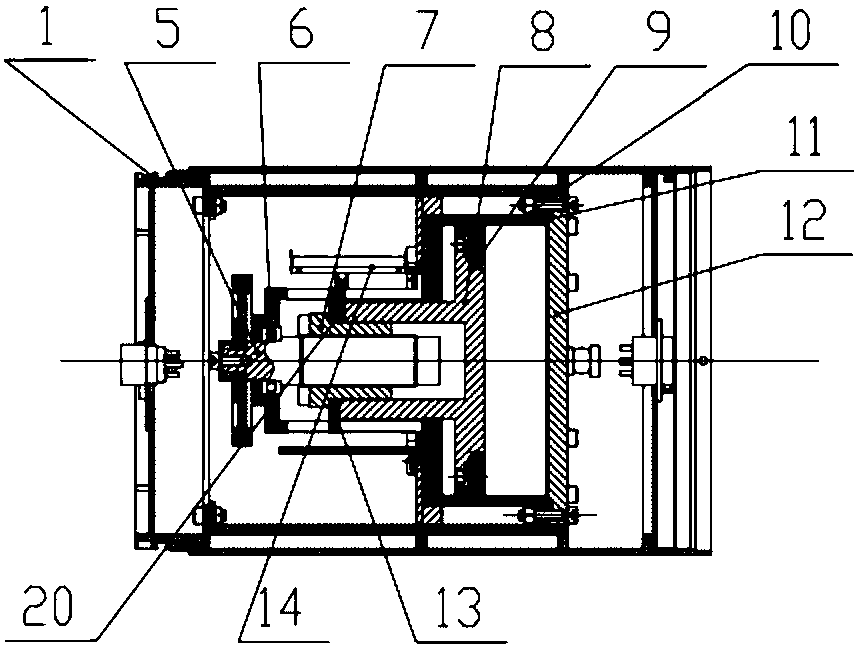
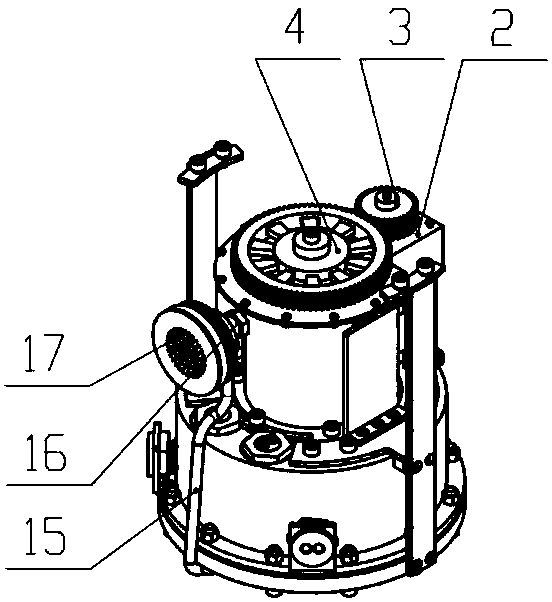
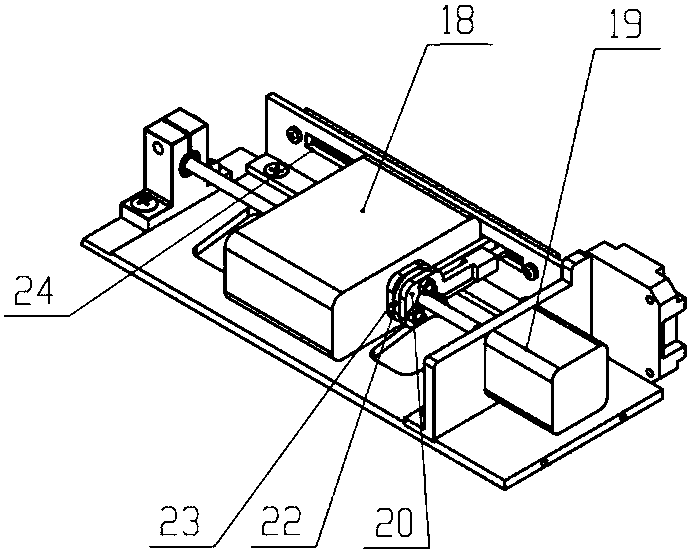
[0020] The invention provides a micro-miniature underwater robot buoyancy adjustment system, which is adjusted by suction and drainage. The motor directly drives the piston to move through the gear and the screw. The structure is simple and compact. In addition, the water absorption and displacement can be adjusted through a small potentiometer. Accurate measurement, the leveling part directly uses the screw motor to drive the leveling lead to move back and forth, and the large potentiometer is used to accurately measure the leveling amount, so as to achieve precise control of buoyancy adjustment without changing the overall attitude of the AUV.
[0021] In order to better understand the above-mentioned technical solution, the above-mentioned technical solution will be described in detail below in conjunction with the accompanying drawings and specific implementation methods.
[0022] Such as Figure 1-Figure 4 As shown, a micro-miniature underwater robot buoyancy adjustment s...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thread major diameter | aaaaa | aaaaa |
| Resistance | aaaaa | aaaaa |
| The inside diameter of | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com