Multi-robot cooperation working method and cooperation control system
A multi-robot, collaborative work technology, applied in the field of measurement and communication, can solve the problems of time synchronization, avoid delay and meet the needs of time synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
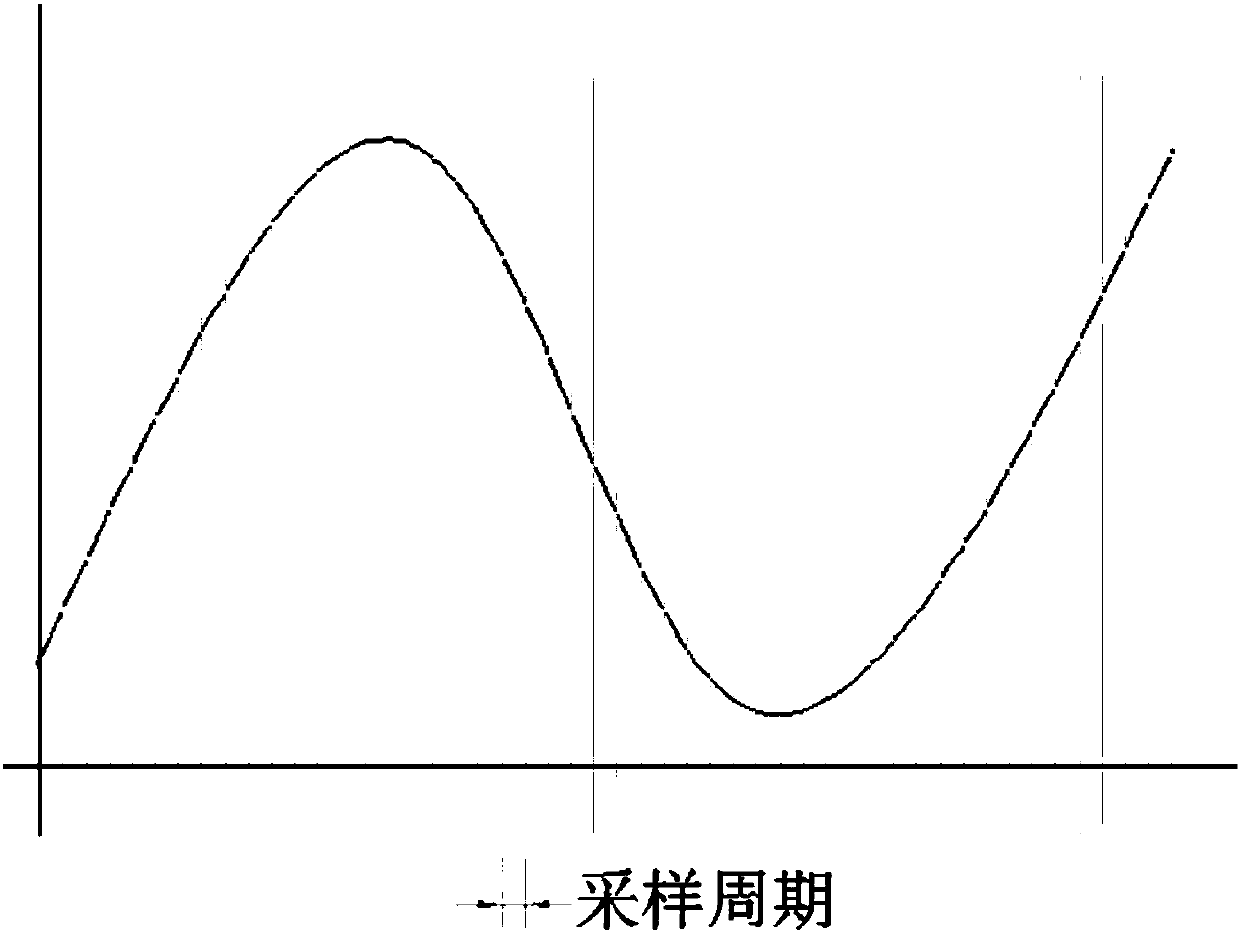
[0046] figure 1 It is a schematic diagram of sampling of alternating analog signals by the multi-robot cooperative control system of the present invention;
[0047] Such as figure 1 As shown, different sampling frequencies are set for different precision requirements.
[0048] In the application, the clock has certain precision requirements, and it cannot truly achieve zero error. The time synchronization of the present invention also satisfies the error requirement accordingly (generally it will be accurate to a higher order of magnitude); when the accuracy requires ±0.1s, the synchronization requirement is carried out by ±0.01s; if the requirement is ±1ms, then the synchronization is carried out by ±0.1s ms; correspondingly, the sampling period / frequency are 0.01s / 100Hz and 0.1ms / 10kHz respectively.
[0049]As mentioned above, the higher the sampling frequency, the greater the accuracy of time synchronization, but the corresponding calculation amount is also greater, and ...
Embodiment 2
[0070] On the basis of Embodiment 1, Embodiment 2 provides a multi-robot cooperative control system.
[0071] include:
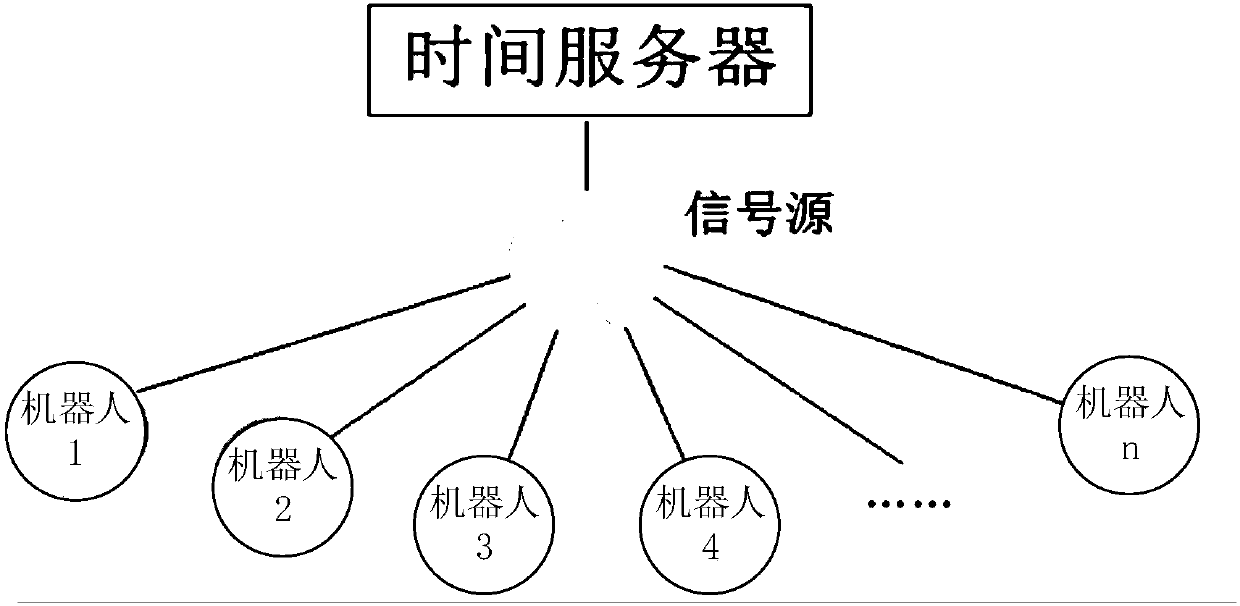
[0072] A signal source, a server connected to the signal source and several robots; among them
[0073] Through the measurement and calculation of the signal source signal by the server and each robot, the time synchronization between each robot is realized.
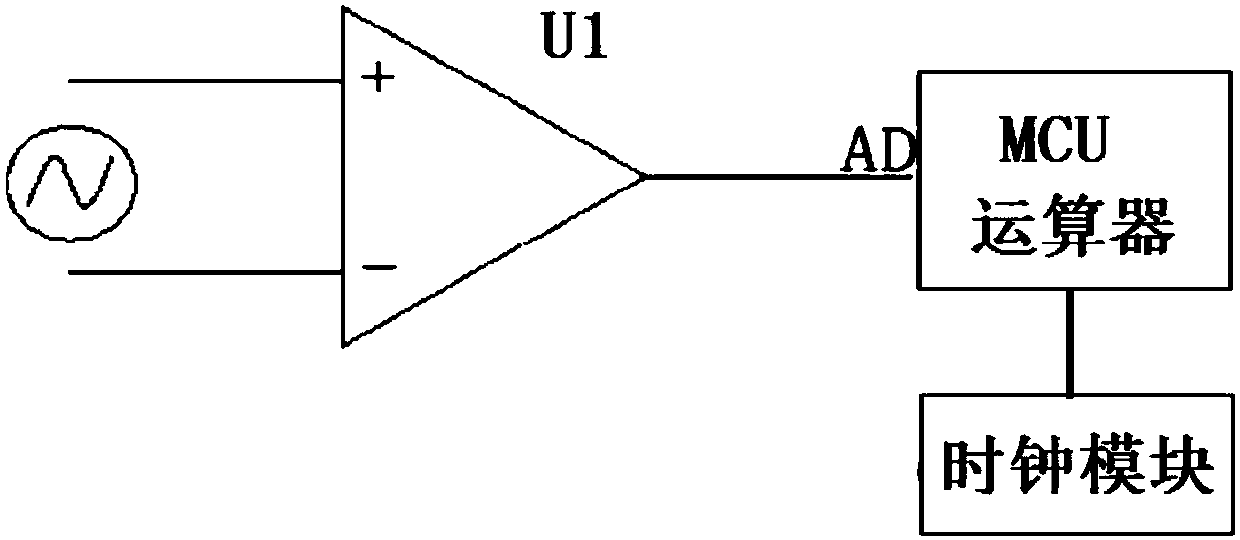
[0074] The signal source is suitable for generating a long-period alternating analog signal to ensure that all robots complete the data acquisition of the alternating analog signal under the condition of maximum communication delay within one period, and the signal strength is suitable for simultaneous acquisition by each robot; And the same multi-robot collaborative control system is used in the server and several robots; the multi-robot collaborative control system includes: operational amplifier, AD converter, MCU computing unit and clock module; wherein the operational amplifier collects alternati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com