Control method of six degrees of freedom serial robot based on not satisfying pieper criterion
A control method and robot technology, applied in the direction of program control, general control system, program control manipulator, etc., can solve the problems of the influence of robot terminal pose state, cumbersome robot control process, and low control accuracy, so as to reduce the amount of calculation and control The process is simple and orderly, and the effect of high control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0111]In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be described in further detail below with reference to the accompanying drawings and examples. It will be appreciated that the specific embodiments described herein are intended to explain the present invention and is not intended to limit the invention.
[0112]Rather, the present invention encompasses any alternative, modifications, equivalents, and programs that are defined by the claims in the essence and range of the present invention. Further, in order to make the public a better understanding of the present invention, some specific detail portions are described in detail in the detailed description of the invention. The description of these detail portions can also be fully understood in the art.
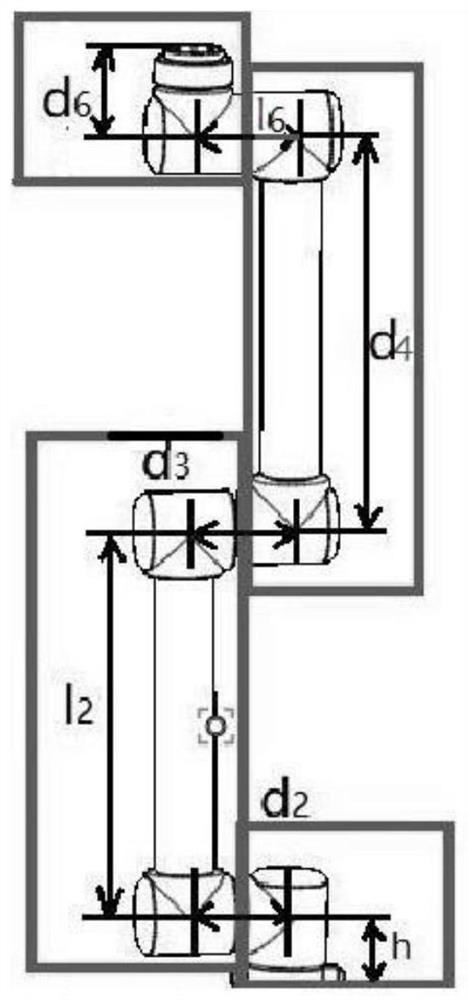
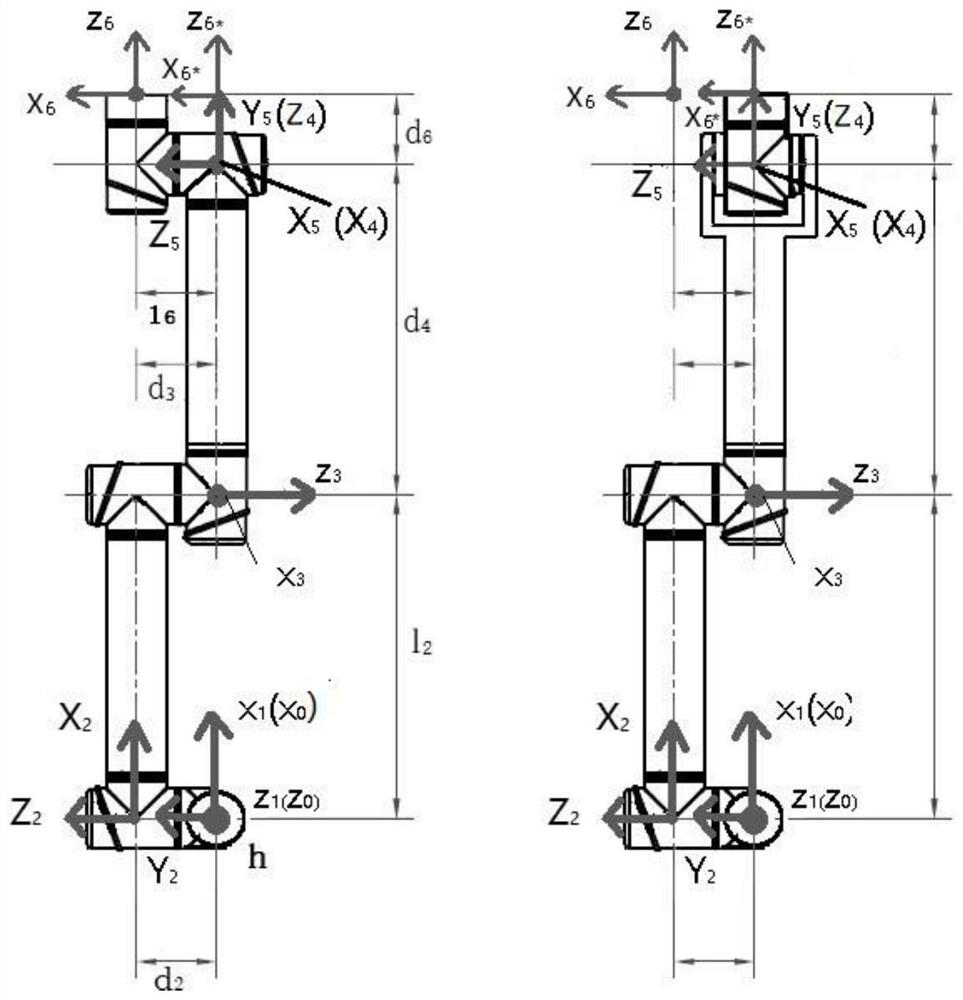
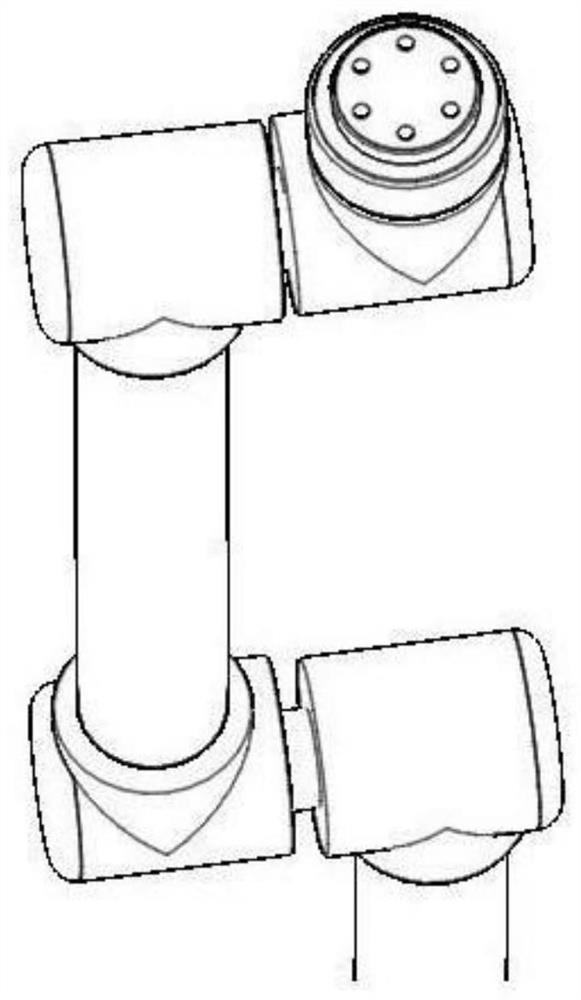
[0113]The three-dimensional model of the six-free series robotic arm includes the base, the arms, the arm, and the end hand palm, such asfigure 1 Indicated. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com