Electrostatic adsorption type soft gripper simulating fin structure
An electrostatic adsorption and software technology, applied in the field of manipulators, can solve problems such as falling off and weight limitations of grasped objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
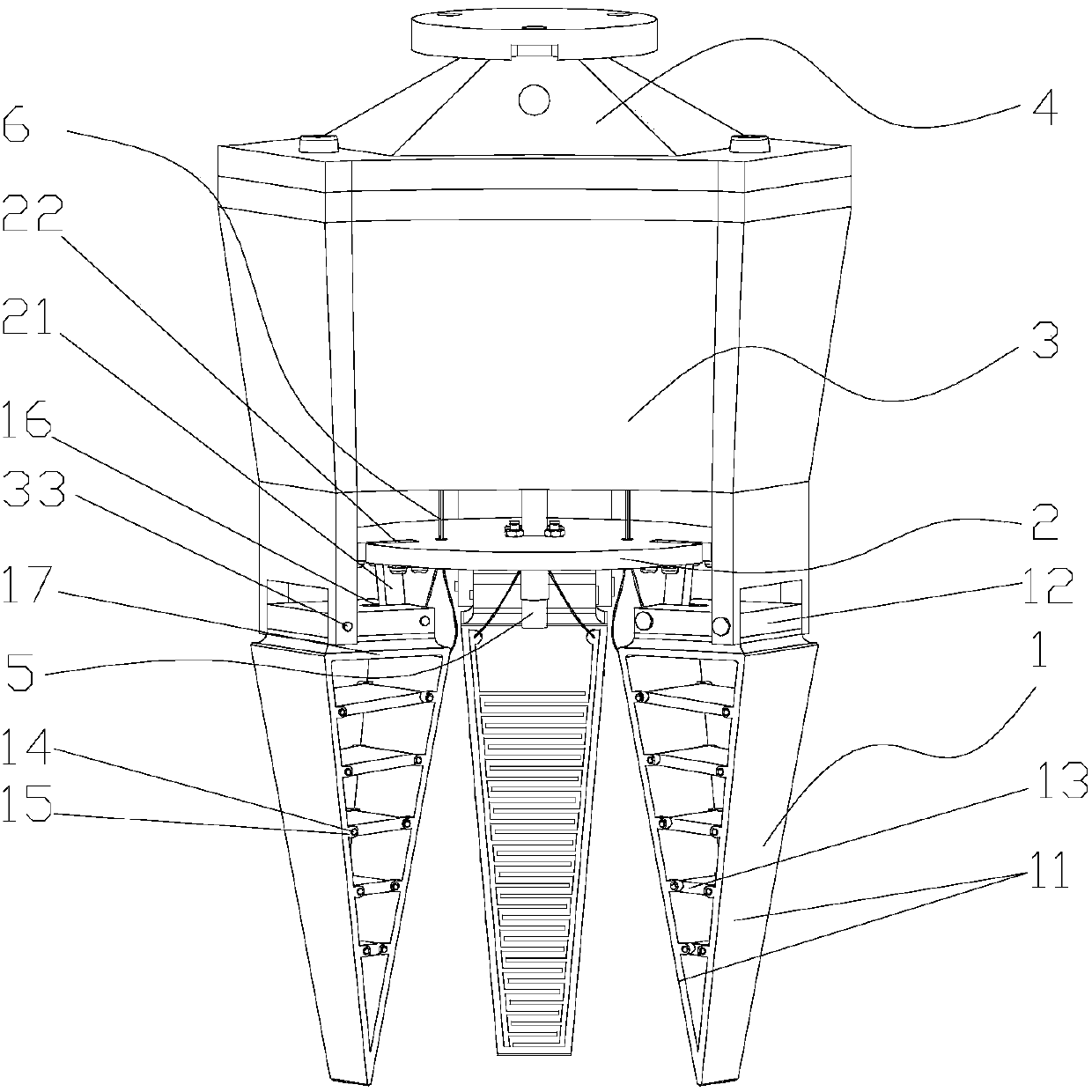
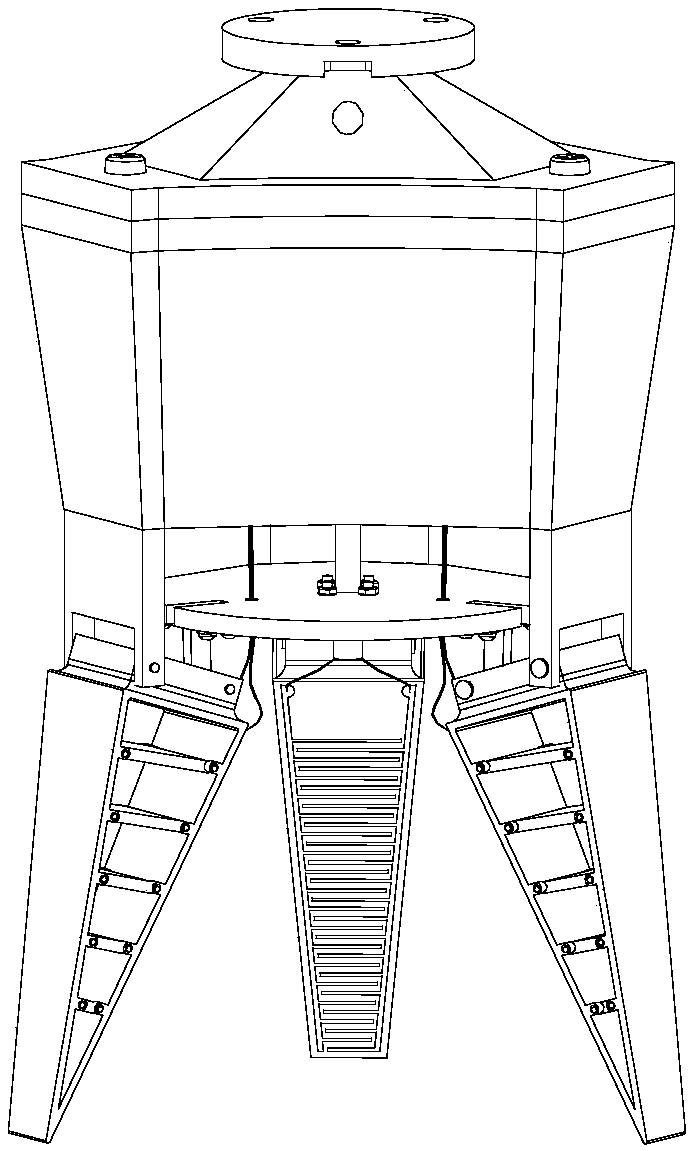
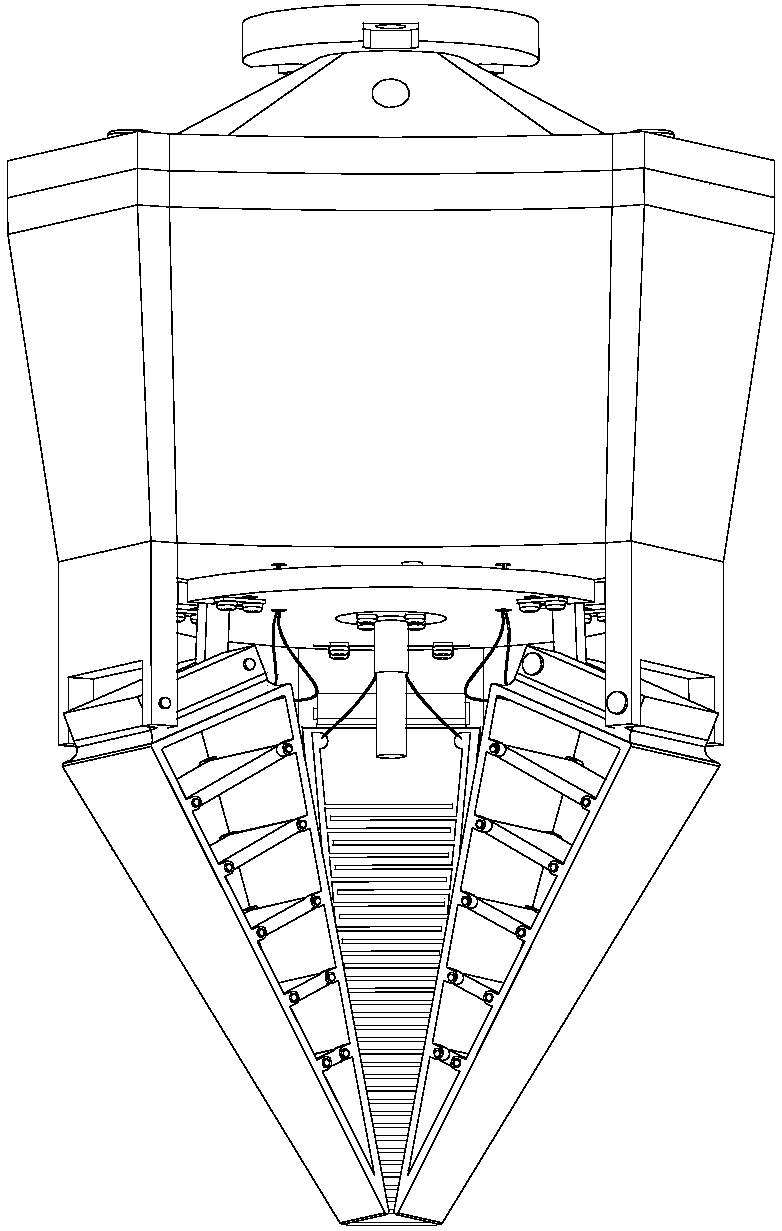
[0026] figure 1 It is a structural schematic diagram of the present invention, figure 2 It is a schematic diagram of the open state of the software gripper of the present invention, image 3 It is a schematic diagram of the closed state of the soft gripper of the present invention, Figure 4 It is a structural schematic diagram of a grasping state of the present invention, Figure 5 It is a structural schematic diagram of another grasping state of the present invention, Image 6 It is a structural schematic diagram of the mounting base of the present invention, Figure 7 It is a structural schematic diagram of the drive disk of the present invention, Figure 8 It is a schematic diagram of the side structure of the fin-ray finger of the present invention, Figure 9 It is a schematic diagram of the fin-type finger electrode structure of the present invention, as shown in the figure: a kind of electrostatic adsorption soft gripper imitating fish fin structure in this embodi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com