An Intelligent Control System of Manipulator Based on Multi-eye Stereo Vision
A multi-eye stereo vision and intelligent control system technology, applied in the field of image recognition and robotic arm, can solve the problems of error in the robotic arm, failure to grasp, loss of robotic arm and motor, etc., and achieve the effect of precise positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
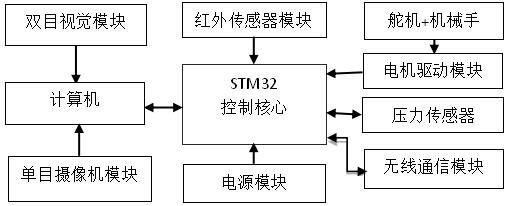
[0053] An intelligent control system of a manipulator based on multi-eye stereo vision, including a manipulator installed on the side of the target object and acting on the target object. The manipulator can use a manipulator with three degrees of freedom, a manipulator with four degrees of freedom, a manipulator with five degrees of freedom, and a manipulator with six degrees of freedom. And any manipulator in the seven-degree-of-freedom manipulator; What adopted in this technical scheme is a six-degree-of-freedom manipulator. A gripper is installed at the end of the small arm of the manipulator; and a manipulator controller connected with the manipulator signal.
[0054] A binocular camera image acquisition unit acting on the target object is fixedly installed around the manipulator. The binocular camera image acquisition unit uses two cameras installed in parallel on a tripod bracket. The baselines of the two cameras are adjusted to be consistent with the plane of the feedin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com