Improved robot claw structure
A technology of robot hands and grippers, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of high cost of spare parts, poor flexibility, time-consuming and laborious replacement, etc., to improve adaptability, improve firmness, and improve adsorption clips The effect of maintaining stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The standard parts used in the present invention can be purchased from the market, and the special-shaped parts can be customized according to the instructions and the accompanying drawings. The specific connection methods of each part adopt mature bolts, rivets, welding in the prior art , pasting and other conventional means, no longer described in detail here.
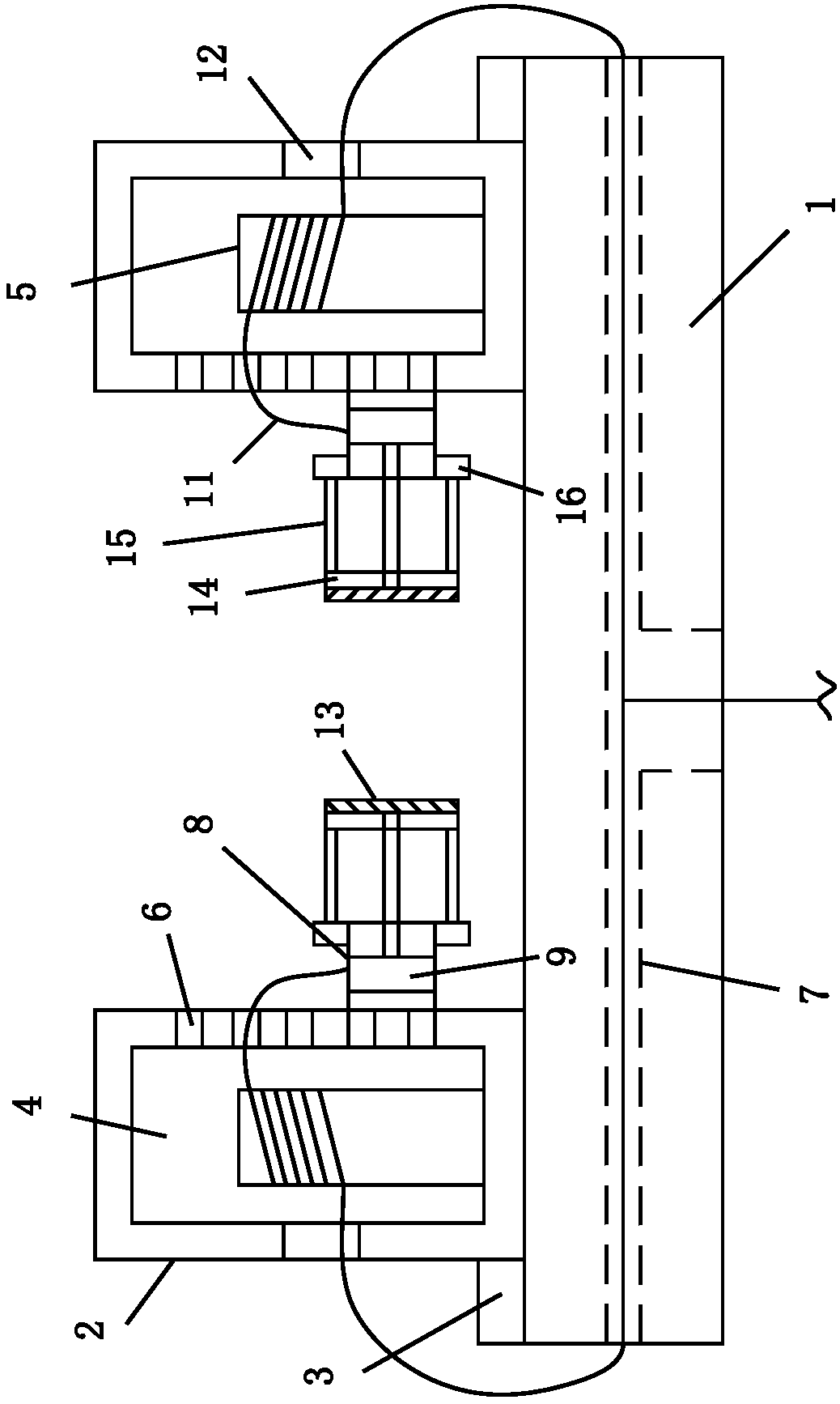
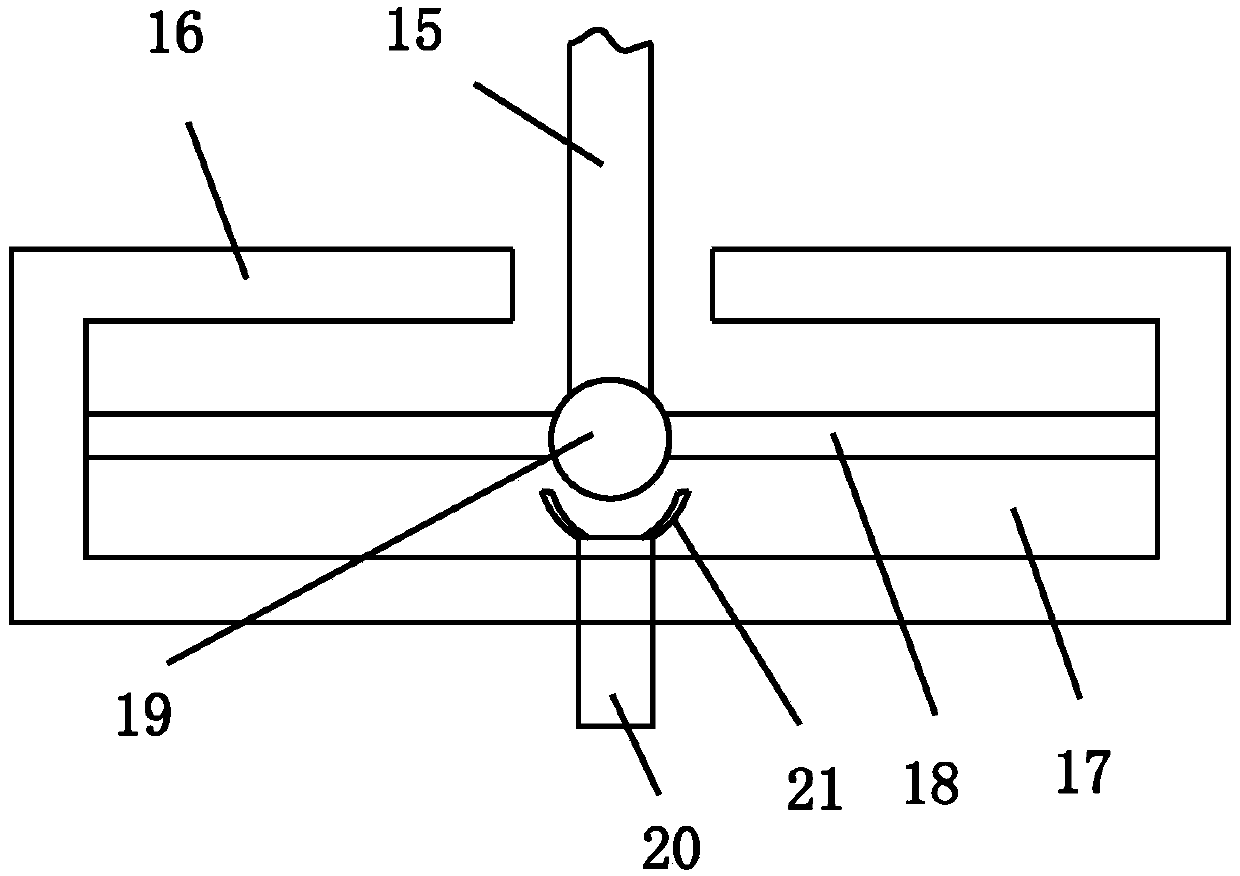
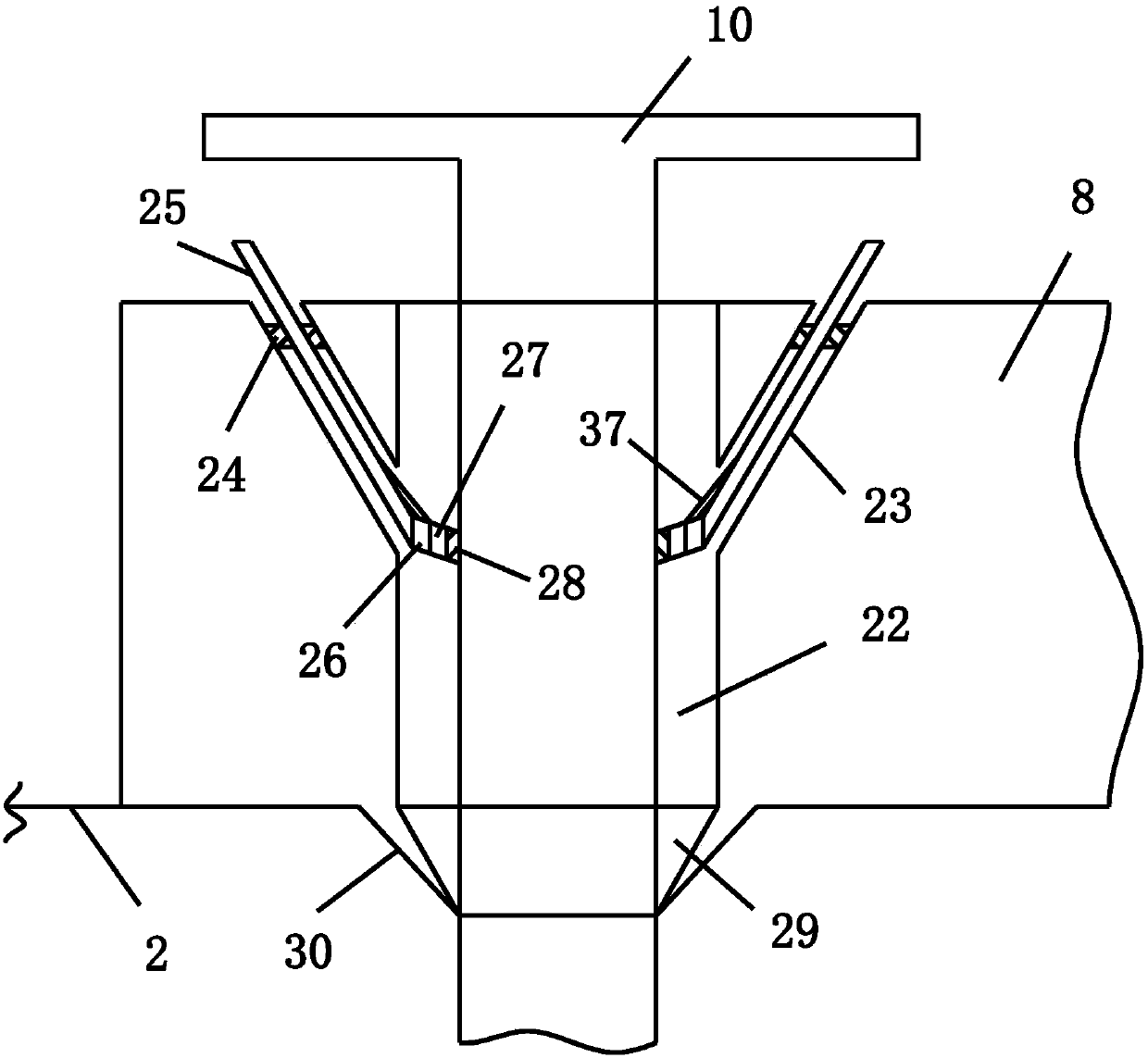
[0019] refer to Figure 1-4 , a specific embodiment of the present invention includes a bottom plate 1, two splints 2 are slidably connected to the top of the bottom plate 1, the splints 2 are connected to the cylinder 3, a first cavity 4 is arranged inside the splint 2, and the inner shaft of the first cavity 4 Connected to the turntable 5, the inner wall of the splint 2 is uniformly provided with several threaded holes 6 communicating with the first cavity 4, and the outer wall of the splint 2 is provided with a second through hole 12 communicating with the first cavity 4, The inside of the bottom plate 1 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com