Trajectory tracking control method, device and system for variable-parameter open-frame marine underwater robot
An underwater robot, trajectory tracking technology, applied in the direction of control/regulation system, non-electric variable control, height or depth control, etc., to achieve the effect of improving response speed and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] SUMMARY OF THE INVENTION The specific implementation of a variable parameter open-frame marine robot trajectory tracking control method is as follows:
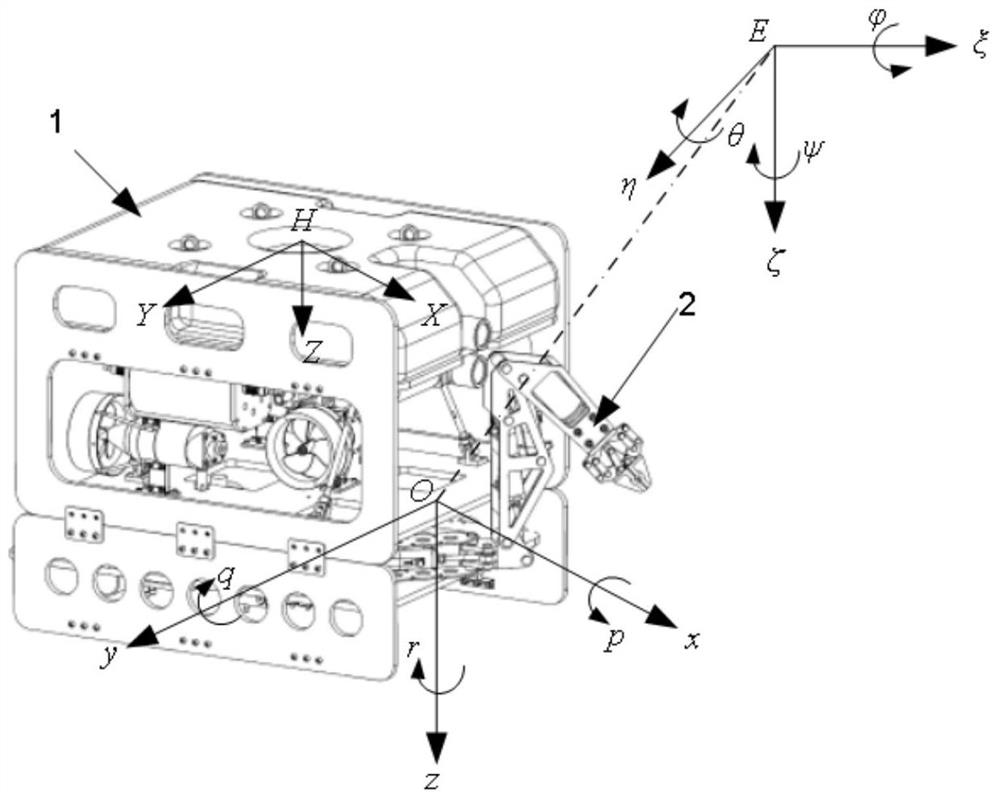
[0029] like figure 1 As shown, a local coordinate system H-XYZ is established on the motion platform 1 to represent the parameters of the variable-parameter open-frame marine underwater robot and to parameterize the center of gravity of the robotic arm 2. The origin H is located at the center of gravity of the upper surface of the marine robot, and the X axis Along the direction of the ocean robot, the Y axis is perpendicular to the X axis and points to the right side of the robot, and the Z axis is perpendicular to the XY plane and points to the bottom of the robot. When establishing the local coordinate system of the variable-parameter open-frame marine underwater robot motion platform, a geodetic coordinate system with the earth as the reference object is also established. The geodetic coordinate system takes the E l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com