Vehicle AGV system based on cyber-physical system and traffic control method
A technology of information-physical fusion and vehicle system, applied in the field of AGV vehicle design and traffic control, can solve the problems of low vehicle transportation efficiency, waste of time and energy, low vehicle driving flexibility, etc., to improve the efficiency of information collection and utilization, save money Time and energy, the effect of reducing transport time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as a limitation of the present invention.
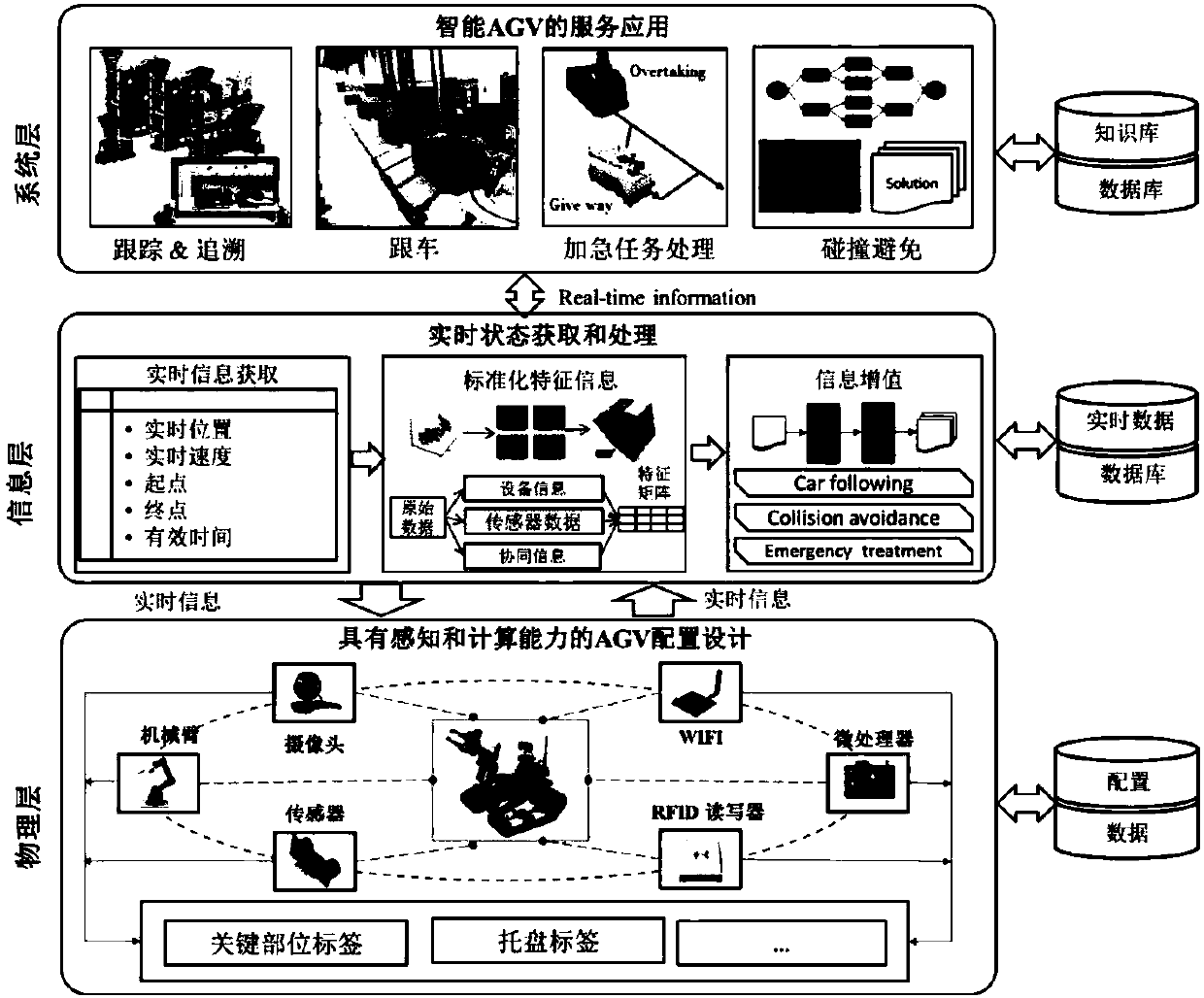
[0056] see figure 1 , The present invention designs an AGV vehicle system and traffic control method based on Cyber-physical system, the purpose is to solve the current shortage of AGV vehicle transportation, adopt a new traffic control method, improve transportation efficiency and vehicle flexibility, in order to achieve intelligent Chemical logistics transportation provides a feasible solution.
[0057] The system includes AGV vehicle, intersection controller, master controller and workshop positioning system.
[0058] The workshop positioning system calculates the position information of all AGV vehicles in the workshop and sends it to the corresponding AGV vehicles; the general controller realizes task arrangement, and can assign the task start...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com