Approximate discrete fast terminal sliding mode control method for pmsm speed control system
A technology of terminal sliding mode and speed control system, which is applied in the direction of control system, control generator, vector control system, etc., and can solve problems such as limitations, insufficient control ability, and difficult to exert robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
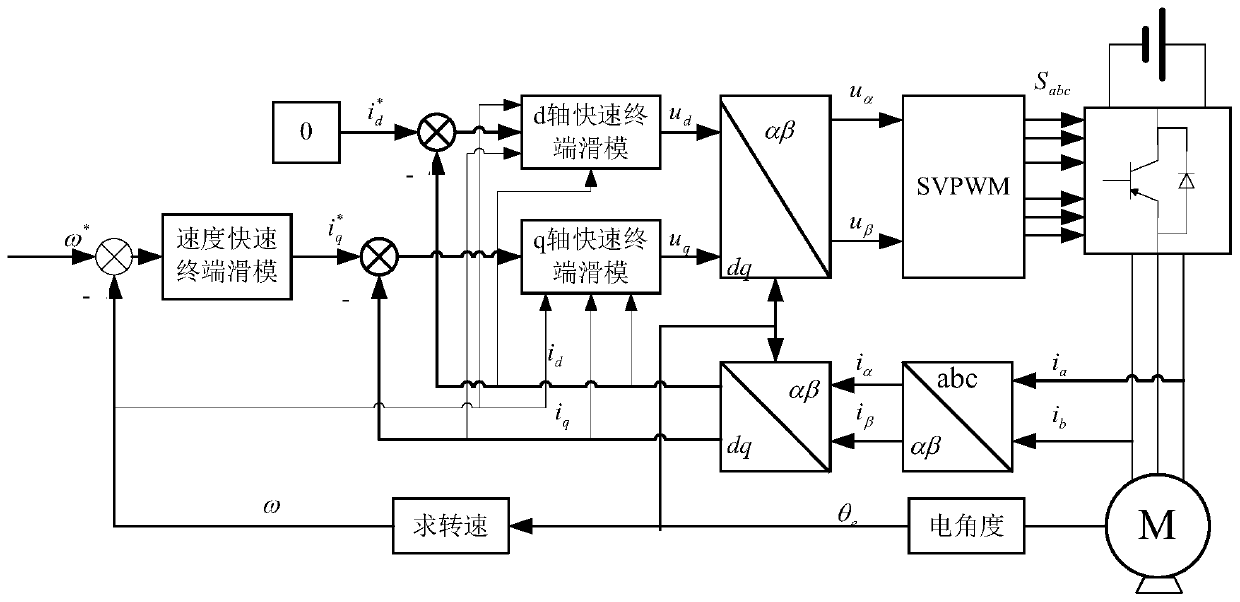
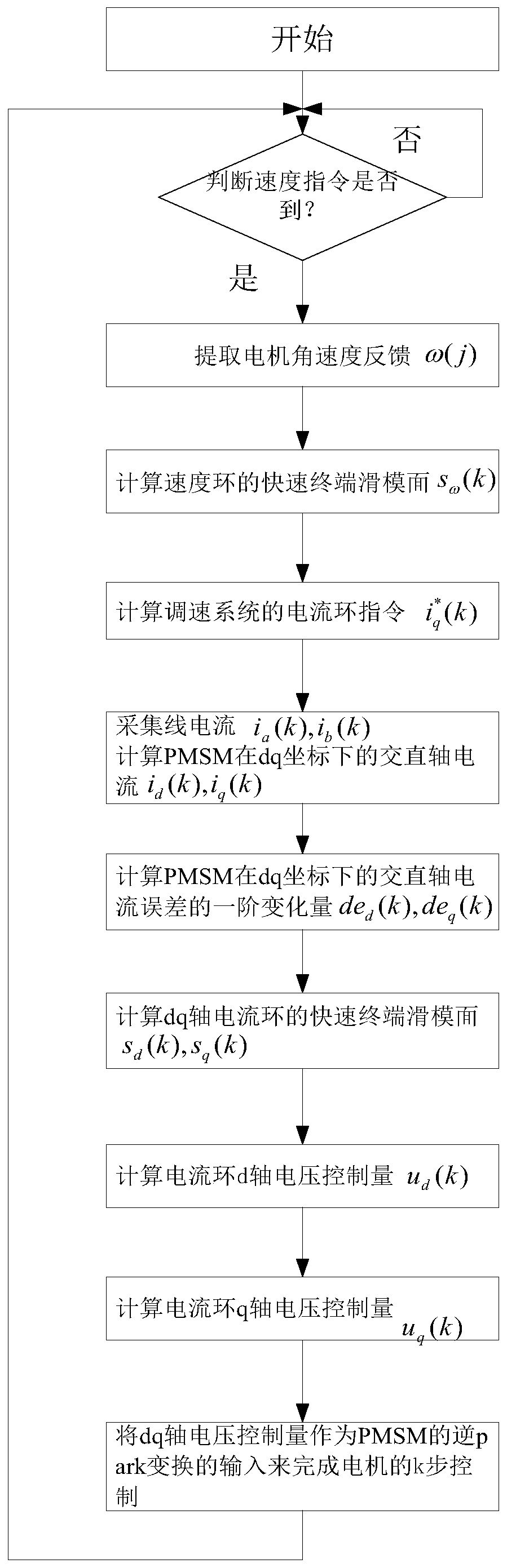
[0057] The present invention can solve the performance of the traditional PI controller of the artillery follow-up system to the PMSM parameters of the actuator (such as the stator permanent magnet flux linkage ψ f , Stator resistance R s , AC-D axis inductance L d , L q It is very difficult to achieve high performance and high control effect due to the change with the environment and the weak robustness such as external torque disturbance. The hidden pole motor (inductance of the AC and D axis is equal, L d = L q = L), using the fast terminal sliding mode variable structure control method to design the speed loop and current loop controllers, and using the first-order Euler discretization to approximate the realization, in order to improve the control performance and r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com