Fluid driving bending joint of spiral spring frame
A technology of helical springs and bending joints, which is applied in the direction of claw arms, manipulators, manufacturing tools, etc., can solve problems such as falling off, difficult machining accuracy, and inability to replace cylindrical elastic bodies separately, achieving small fluid flow, high dynamic control accuracy, The effect of easy axial deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
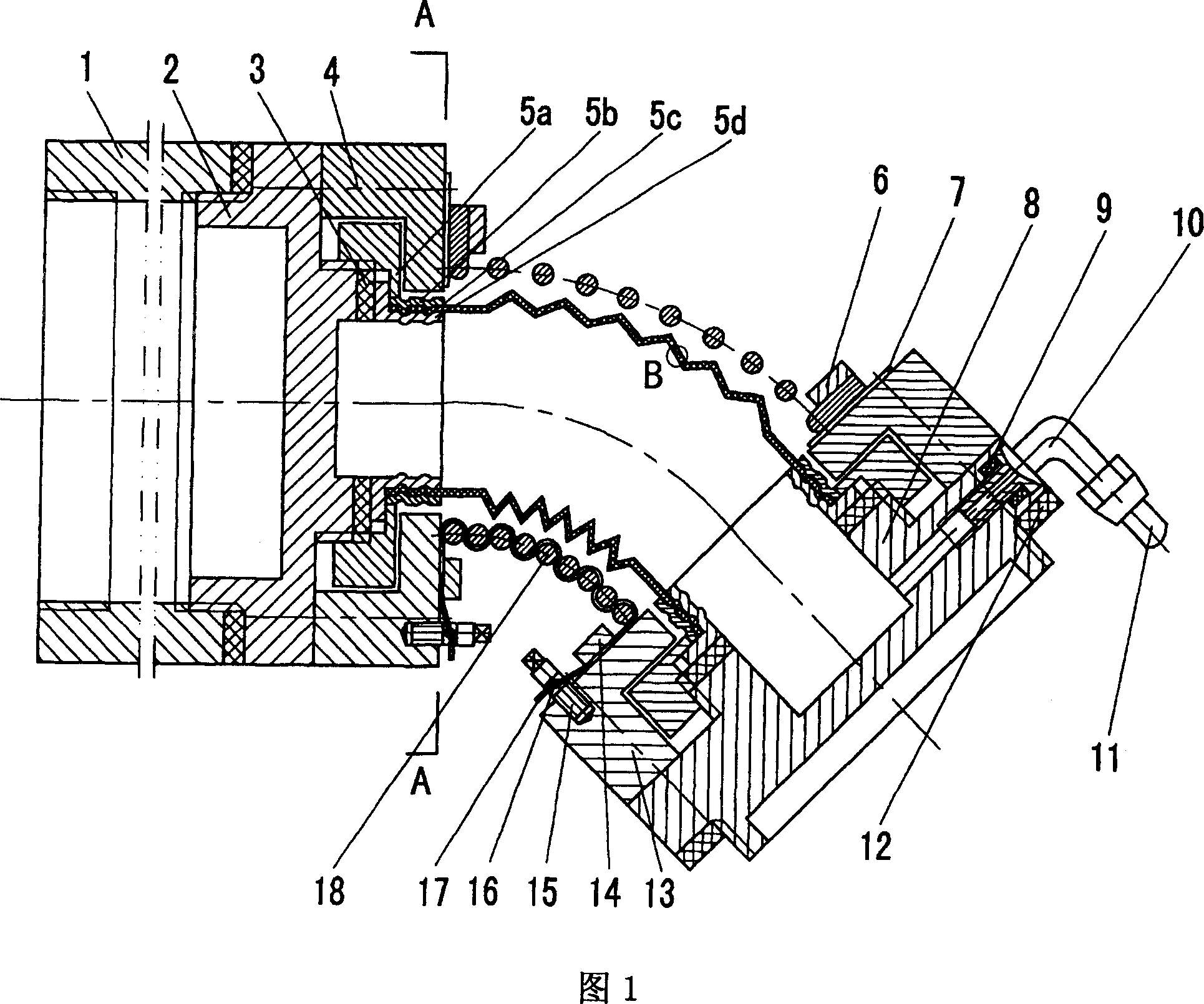
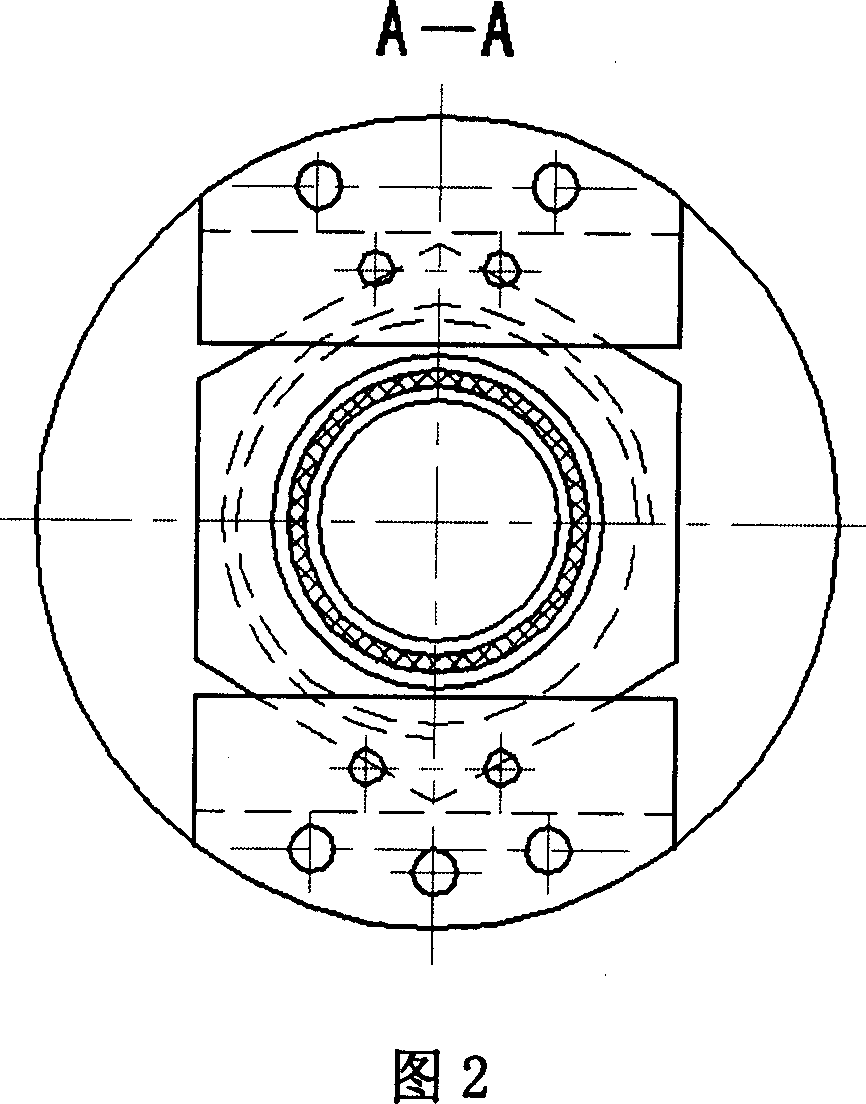
[0028] Below the present invention will be further described in conjunction with the implementation of scheme I in the accompanying drawings:
[0029] The joint of plan I is mainly composed of intermediate section 1, head seat 2, large sealing ring 3, spring fixing seat 4, connecting sealing nut 5a, fastening shell 5b, elastic wave shell 5c, flange inner sleeve 5d, spring fixing pressure plate 6, Adjusting gasket 7, tailstock 8, small sealing ring 9, right-angle pipe joint 10, hose 11, thickness adjusting ring 12, tensioning wire seat 13, wire guide frame 14, tensioning screw 15, fixing screw 16, fixing wire 17, helical spring 18, annular weft 19, winding warp 20 etc. constitute.
[0030] Its specific implementation method is:
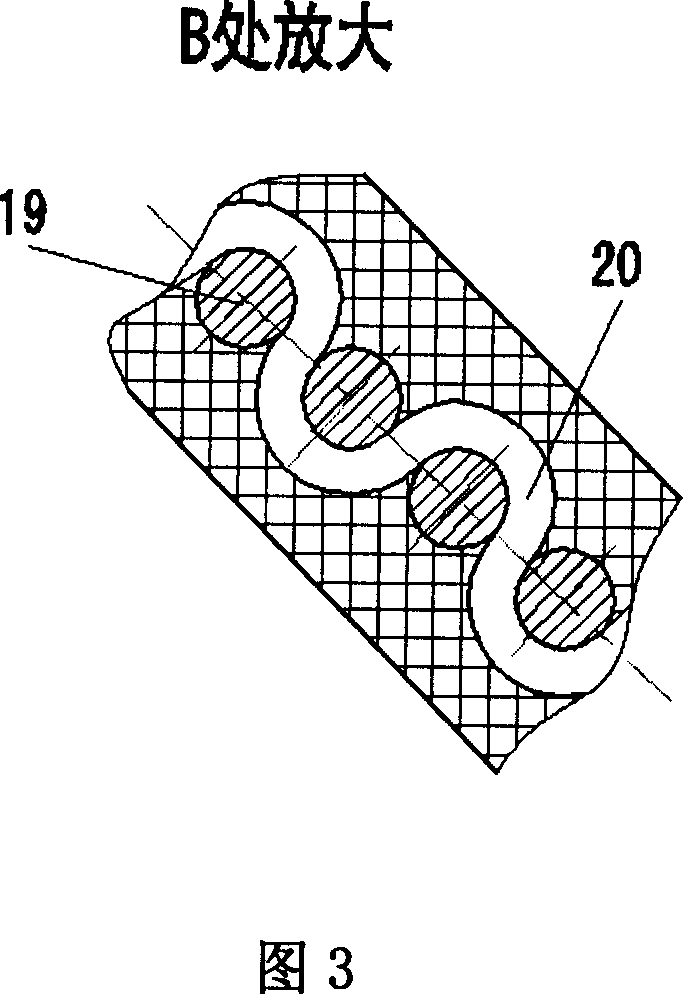
[0031] (1) The longitudinal section of the single-section elastic wave shell of the elastic wave shell 5c is in the shape of "V", "U" or "Ω". The warp wire 20 makes the elastic wave shell 5c not easily deformed in the radial direction and has a stron...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com