Action training method of human-like multi-degree-of-freedom robot
A training method and robot technology, applied in the field of action training, can solve problems such as action distortion and reduce the completion of robot actions, and achieve the effect of improving accuracy and completion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] Through the following description of the embodiments, it will be more helpful for the public to understand the present invention, but the specific embodiments given by the applicant cannot and should not be regarded as limitations on the technical solutions of the present invention, any components or technical features Changes to the definition and / or formal but not substantive changes to the overall structure should be regarded as the scope of protection defined by the technical solutions of the present invention.
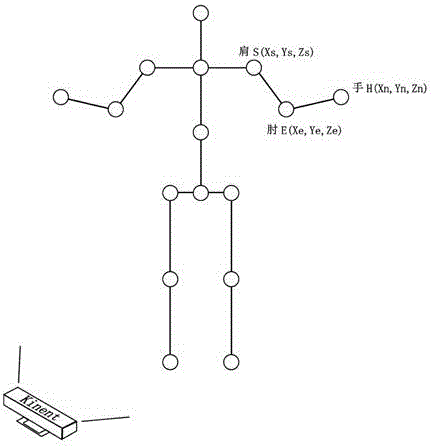
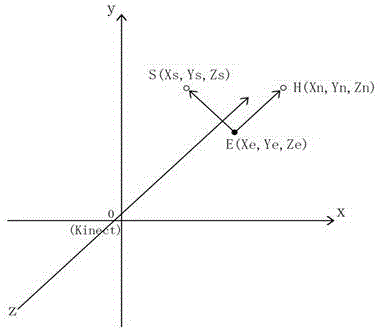
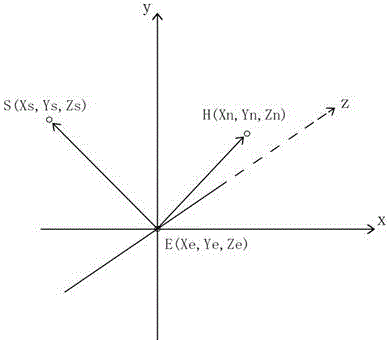
[0013] A motion training method for a humanoid multi-degree-of-freedom robot, the method comprising the following steps: using an optical device to identify the bone data of a motion capture person, the optical device is an optical device with a dual camera and an infrared camera (similar to kinect, prime sense, RealSense, etc. ), map the bone joint coordinates to the mathematical coordinate system, calculate the coordinates of the left shoulder, left elbow ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com