A Constraint Satisfiable Mission Planning Method for Deep Space Exploration Based on Empty Actions
A technology for mission planning and deep space exploration, which is applied in the field of aerospace deep space exploration, can solve problems such as complex constraints and strong coupling relationships between constraints, and achieve the effects of improving efficiency, meeting real-time requirements, and avoiding invalid algorithm backtracking operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
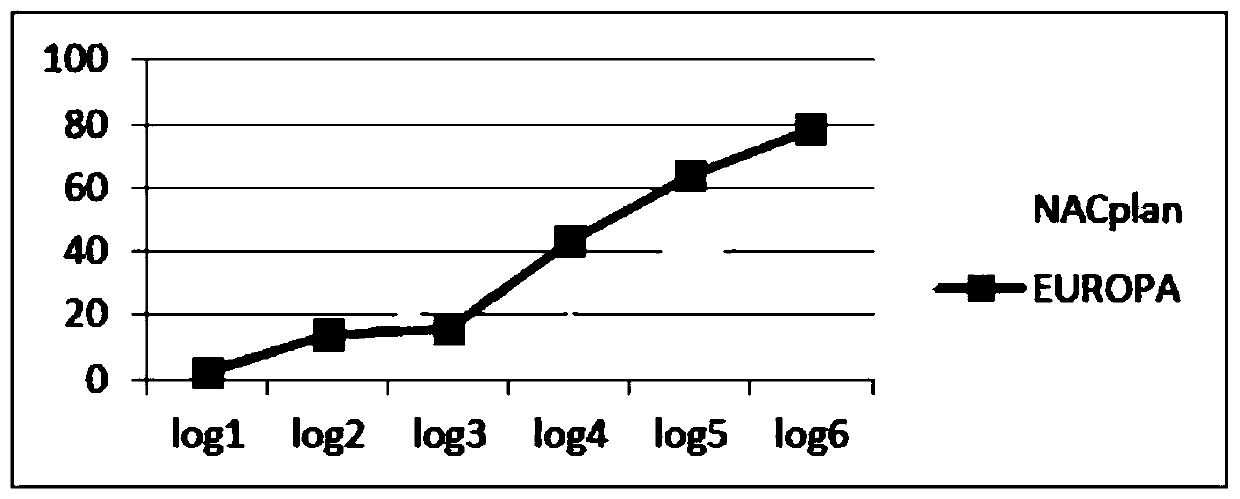
[0045] Embodiment 1 Orbital correction task: Under the conditions described in task 1, the autonomous task planning method and the EUROPA autonomous task planning method of the present invention are used for task planning, respectively, to illustrate the beneficial effects of the present invention. The conditions for task 1 are:
[0046] Track correction sub-module parameter description and test cases
[0047]
[0048] Both the autonomous mission planning method and the EUROPA autonomous mission planning method of this embodiment include step 1 of establishing a deep space probe system model.
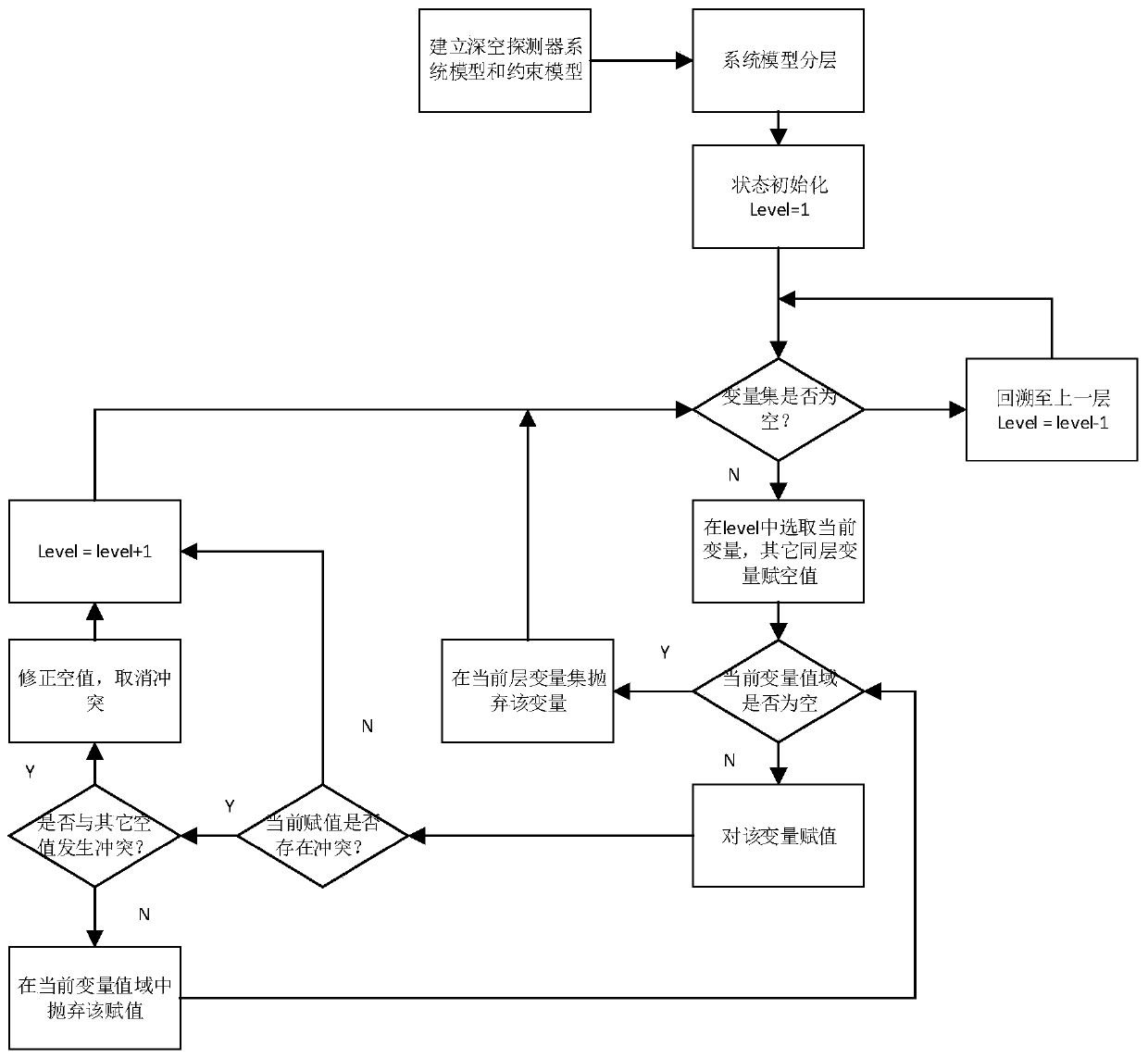
[0049] The method of deep space exploration constraints based on air motions disclosed in this embodiment that can satisfy mission planning includes the following steps:
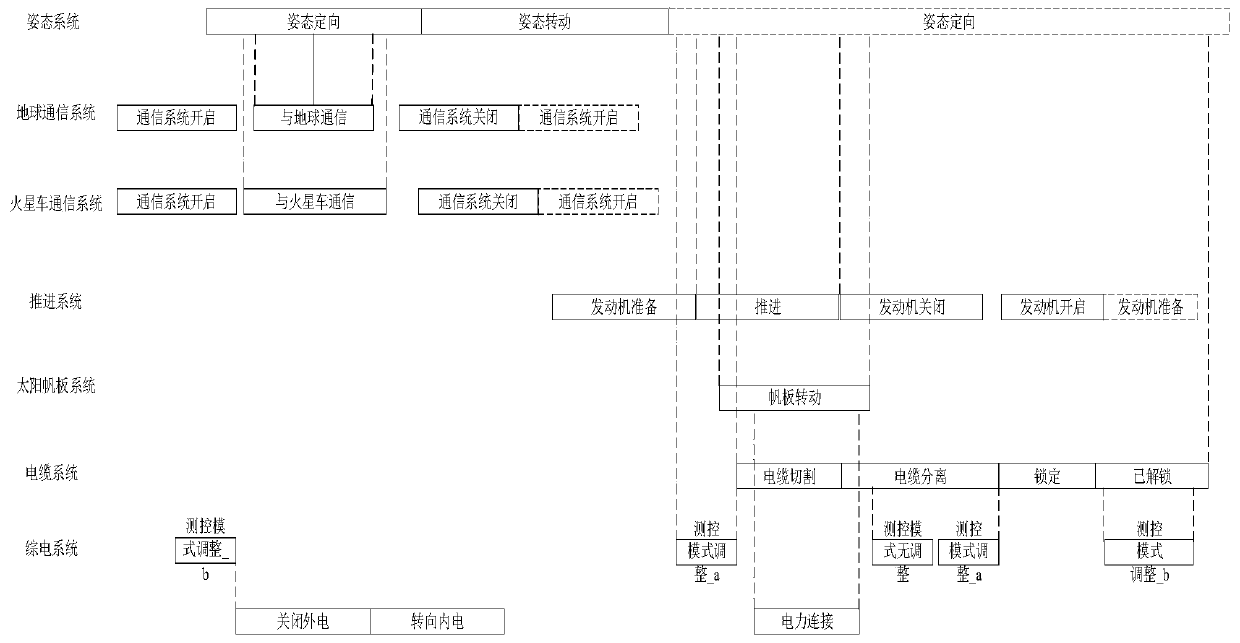
[0050] Step 1. Build a deep space probe system model.
[0051] The specific system model of the orbit correction task is shown in Table 1.
[0052] Step 2. Establish a confinement model for deep space probes.
[0053] The specif...
Embodiment 2
[0068] Embodiment 2 Machine separation task: Under the conditions described in task 2, the autonomous task planning method and the EUROPA autonomous task planning method of this embodiment are used for task planning, respectively, to illustrate the beneficial effects of the present invention. The stated task 2 conditions are:
[0069] Parameter description and test cases of solving sub-module at the time of device separation
[0070]
[0071] Both the autonomous mission planning method and the EUROPA autonomous mission planning method of this embodiment include step 1 of establishing a deep space probe system model.
[0072] The method of deep space exploration constraints based on air motions disclosed in this embodiment that can satisfy mission planning includes the following steps:
[0073] Step 1. Build a deep space probe system model.
[0074] The specific system model of the separation task of the reactor is shown in Table 1.
[0075] Step 2. Establish a confinement model for deep...
Embodiment 3
[0092] Embodiment 3 Load switch task: Under the conditions described in task 3, the autonomous task planning method of this embodiment and the EUROPA autonomous task planning method are respectively used for task planning, which illustrates the beneficial effects of the present invention. The stated task 3 conditions are:
[0093] Parameter description and test cases for solving sub-modules at the moment when the load is switched on and off
[0094]
[0095] Both the autonomous mission planning method and the EUROPA autonomous mission planning method of this embodiment include step 1 of establishing a deep space probe system model.
[0096] The method of deep space exploration constraints based on air motions disclosed in this embodiment that can satisfy mission planning includes the following steps:
[0097] Step 1. Build a deep space probe system model.
[0098] The specific system model of the separation task of the reactor is shown in Table 1.
[0099] Step 2. Establish a confinemen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com