Plane symmetry overconstrained mixed-connected robot
An over-constrained, plane-symmetric technology, applied in the field of robots, can solve the problems of poor mechanical properties, poor robot manufacturing and installation manufacturability, etc., and achieve the effect of good manufacturing and installation manufacturability, compact structure, good manufacturing and equipment manufacturability
Active Publication Date: 2017-12-01
TIANJIN UNIV
View PDF6 Cites 3 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, the super-strong over-constraint relation makes the manufacturability and installation manufacturability of the robot poor
In addition, part of the Hooke hinges in the robot adopts a cantilever structure, which has poor mechanical properties
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0058] Embodiment 1: Install the mounting flange 8 of the fixed frame 5 on the column 9, and match it with a workbench, which can be built as Figure 9 The processing robot workstation shown.
Embodiment 2
[0059] Embodiment 2: Install the mounting flange 8 of the fixed frame 5 on the vertical direction moving unit 10 of the coordinate boring machine structure, which can be built as Figure 10 Manufacturing equipment shown.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
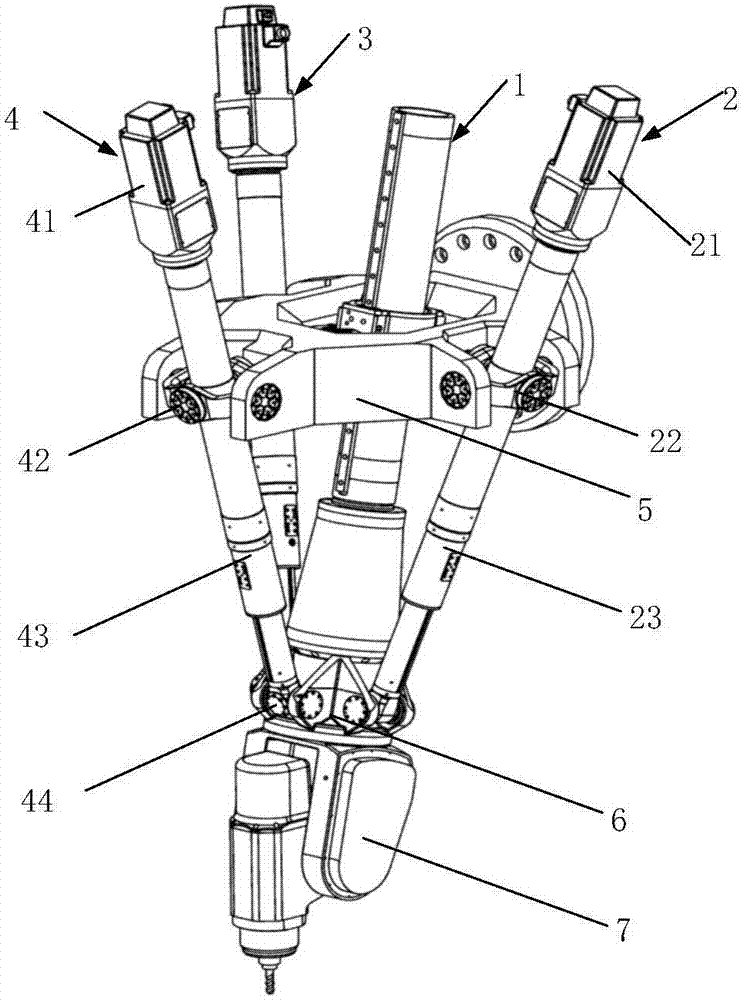
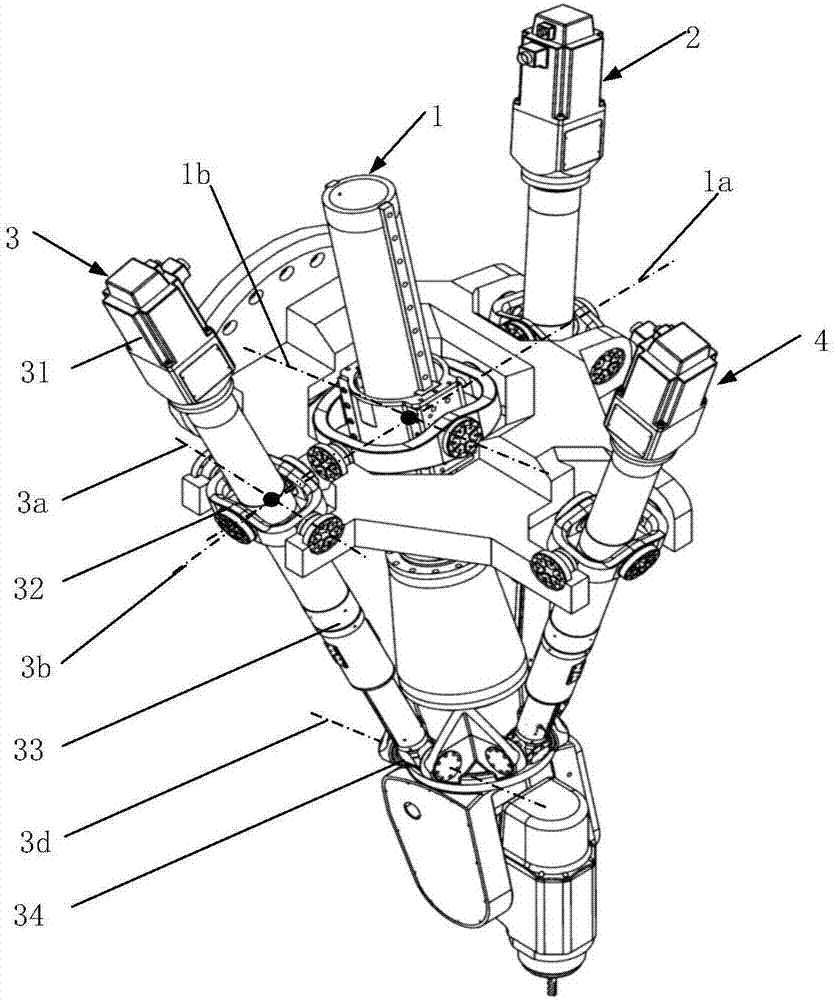
A plane symmetry overconstrained mixed-connected robot comprises a movable platform, a two-freedom-degree rotating head connected to the tail end of the movable platform and a fixing frame; the center of the head end of the movable platform is fixedly connected with the tail end of a first branch chain, the head end of the first branch chain penetrates the center of the fixing frame, the body portion of the first branch chain is in hinged connection with the center of the fixing frame, a second branch chain and a third branch chain are symmetrically hinged to the two side edges of the movable platform, a fourth branch chain is hinged to the position, between the second branch chain and the third branch chain, of the side edge of the movable platform, under primary configuration, the formed robot is of a space plane symmetry structure, and the plane symmetry overconstrained mixed-connected robot has the beneficial effects that the kinematics is simple, the structure is compact, the manufacturing and mounting manufacturability is good, and the work space rack volume ratio is large.
Description
technical field [0001] The present invention relates to a robot. In particular, it relates to a face symmetric overconstrained hybrid robot. Background technique [0002] A space hybrid robot with a positioning head disclosed in patents SE8502327 (or US4732525) and EP0674969 (or US6336375) includes three active adjustment devices and one driven adjustment device that can be extended or shortened in the axial direction; One end of the active adjustment device is fastened to the fixed frame by a hinge, and the other end is connected to the moving platform by a hinge; one end of the driven adjustment device is fixedly connected to the positioning head, and the other end is connected to the fixed frame by a hinge, so that Restrict certain degrees of freedom of the positioning head. It should be noted that the hinge connecting the positioning head and the active length adjustment device of this type of robot is a three-degree-of-freedom hinge, and the number of hinge degrees of...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B25J9/00
CPCB25J9/0072
Inventor 刘海涛董成林黄田朱星桥
Owner TIANJIN UNIV
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com