Dual-fishtailing type miniature underwater robot and control method thereof
A double-swing-tail, micro-water technology, applied in the field of robotics, achieves the effects of light weight, high work efficiency, and ease of lightening
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
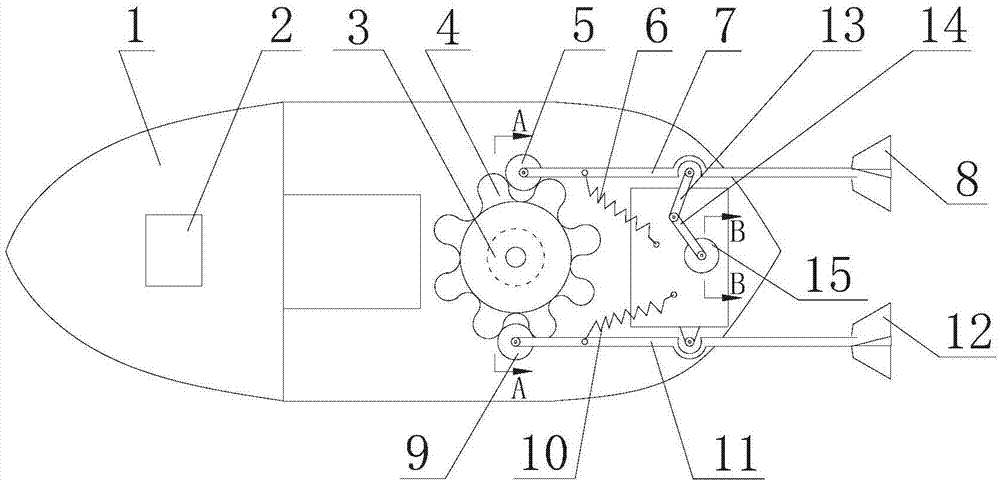
[0041] Such as Figure 1 to Figure 4 As shown, a kind of double-swing tail type miniature underwater robot of the present invention comprises a body 1 and a fishtail drive assembly, and the fishtail drive assembly includes a drive motor 3, a rotating disk 4, an upper swing tail mechanism and a lower swing tail mechanism, and the drive motor 3 is connected with the rotating disk 4 and fixed on the body 1, drives the rotating disk 4 to make a circular motion, and the rotating disk 4 drives the upper tail swing mechanism and the lower tail swing mechanism to swing relative to the body 1.
[0042] exist figure 1 Among them, the upper swing tail mechanism of the present invention includes an upper spring 6, an upper swing rod 7 and an upper tail fin 8, and the structure of the upper tail fin 8 is made by imitating a real fish tail. Contact, the tail of the upper swing rod 7 fixes the upper tail 8, the middle part of the upper swing rod 7 is hinged with the body 1, one end of the u...
Embodiment 2
[0048] The double swing tail type miniature underwater robot of the present embodiment, on the basis of embodiment 1, as figure 1 As shown, the head of the upper swing link 7 is provided with an upper pulley 5, and the head of the lower swing link 11 is provided with a lower pulley 9. When the rotating disc 4 rotates, the upper swing link 7 and the lower swing link 11 are all connected to the rotating disc 4. For sliding friction, reduce motion friction resistance on the one hand, reduce the wearing and tearing of upper swing link 7 and lower swing link 11 on the other hand, prolong the service life of upper swing link 7 and lower swing link 11.
[0049] In addition, the radius of the upper pulley 5 and the lower pulley 9 is consistent with the radius of the first arc surface or the third arc surface. Such a structure makes the upper pulley 5 and the lower pulley 9 consistent with the first arc surface or the third arc surface. Faces are smooth transitions.
[0050] If the up...
Embodiment 3
[0052] The double swing tail type miniature underwater robot of the present embodiment, on the basis of Embodiment 1, the upper swing tail mechanism also includes the first connecting rod 13, the second connecting rod 14 and the adjustment motor 15, and one end of the second connecting rod 14 It is connected with the first connecting rod 13, and the other end is connected with the rotating shaft of the adjusting motor 15, and the adjusting motor 15 is fixedly connected with the body 1, and the first connecting rod 13 is hinged with the upper swing rod 7, and the swing of the empennage on one side is changed by using the connecting rod structure. Width and angle, and then to control the forward direction of the robot, there is no need to set up a separate steering mechanism, which simplifies the structure of the robot, reduces the overall structure of the robot, and is convenient for application in micro-sized occasions.
[0053] A circular arc protrusion is provided on the lowe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com