


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Conduit and guide wire coordinated operation interventional robot and control method thereof
A collaborative operation and robotic technology, applied in the field of minimally invasive vascular interventional surgery, can solve problems such as difficulty in meeting the requirements for collaborative operation of catheters and guide wires, and achieve the effects of reducing weight, reducing costs, and reducing the size of the device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
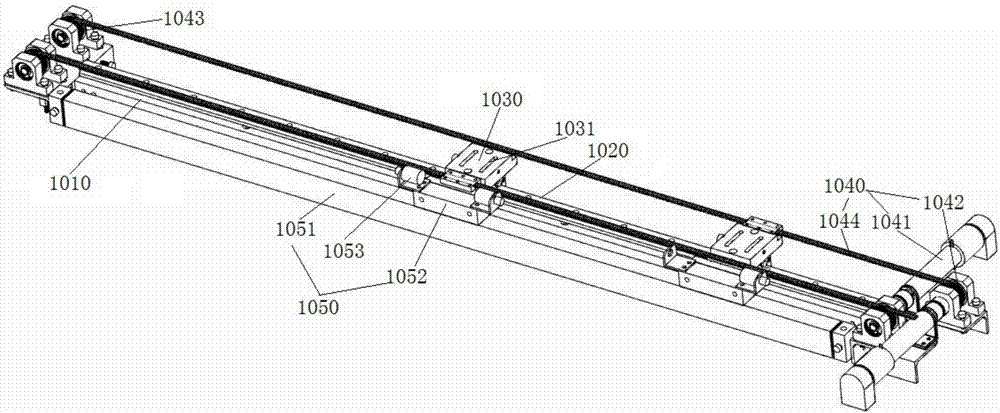
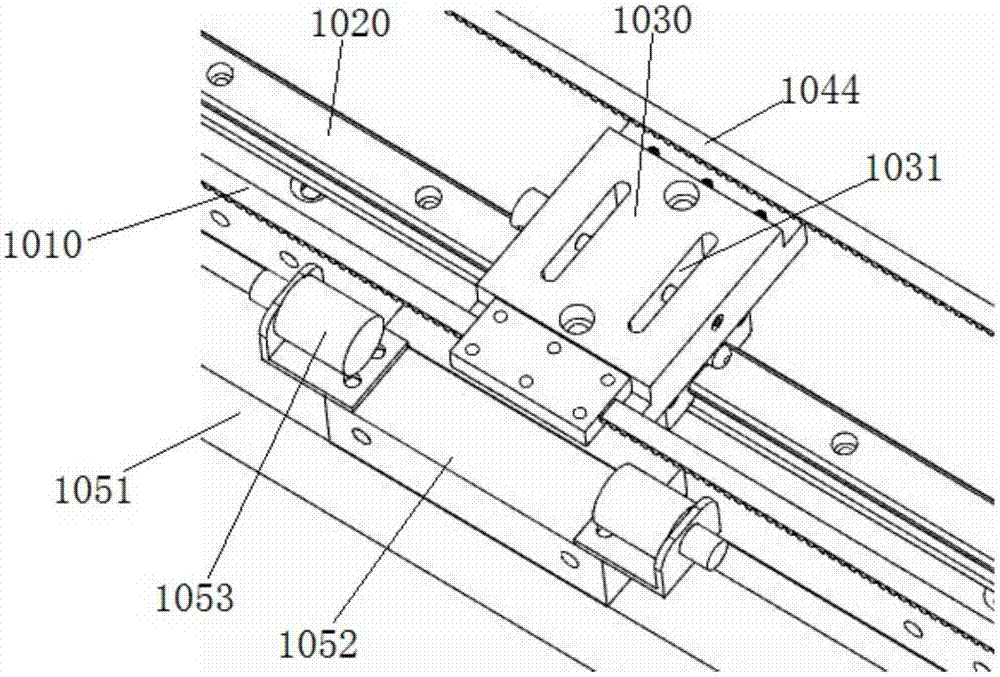
[0086] This embodiment provides a catheter guide wire cooperative operation interventional robot, which mainly completes the cooperative operation control of the catheter guide wire. It mainly includes an operating platform, a catheter controller for controlling the action of the catheter, and a guide wire for controlling the action of the guide wire. Controller; wherein the catheter controller and the guide wire controller are arranged on the operating platform, and the operating platform can control the relative movement between the catheter controller and the guide wire controller. Control the relative movement of the catheter controller and the guide wire controller through the operating platform, and cooperate with the catheter controller to control the catheter and the guide wire controller to control the guide wire, which can meet the coordinated operation of the catheter guide wire in the interventional surgery. The complex manipulation requirements of surgery, this meth...
Embodiment 2
[0092] This embodiment provides an interventional robot that cooperates with a catheter guide wire. On the basis of Example 1, the structure of the catheter controller is optimized, as follows.
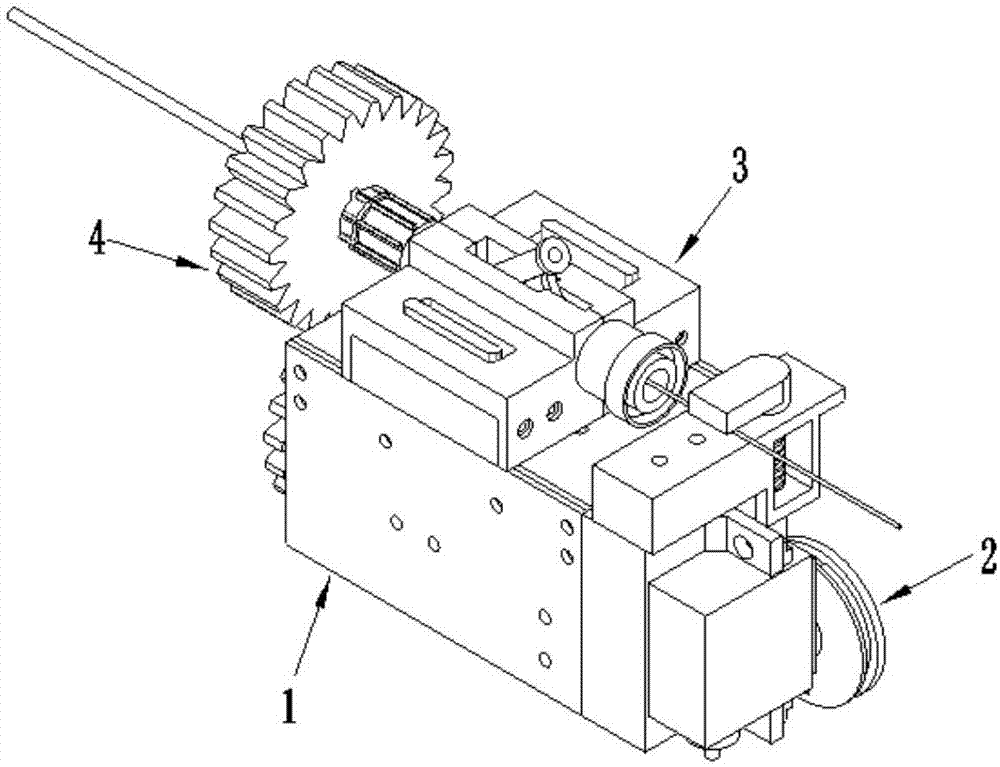
[0093] Such as image 3 As shown, the catheter controller mainly includes five parts, namely the main body 1, the guide wire auxiliary clamping mechanism 2, the catheter clamping mechanism 3, the catheter torsion assembly 4, and the catheter force measuring assembly 5. Among them, the main body 1 is the other The four-part installation foundation. The catheter clamping mechanism 3 and the guide wire auxiliary clamping mechanism 2 can be detached and installed on the main body 1. The guide wire auxiliary clamping mechanism 2 is used to assist in clamping or loosening the guide wire. The clamping mechanism 3 is used to clamp the catheter, the catheter twisting assembly 4 is used to complete the twisting operation of the catheter, and the catheter force measuring assembly 5 is used to detect...
Embodiment 3
[0126] This embodiment provides an interventional robot that cooperates with a guide wire in a catheter. Based on the second embodiment, the structure of the guide wire controller is further optimized and designed as follows.
[0127] Such as Figure 14 As shown, the guide wire controller mainly includes a housing part 3, a clamping mechanism 6, a sleeve drive assembly 7 and a brake brake assembly 8. Among them, the clamping mechanism 6, the sleeve drive assembly 7 and the brake brake assembly 8 are all provided In the housing part 1.
[0128] Still time figure 1 As shown, the housing part 3 includes a housing B910, which is a U-shaped structure with front and rear side walls. Figure 16 In order to see the internal structure of the device clearly, the front wall of the housing B910 has been removed; the top opening of the housing B910 can be detachably installed with an upper cover B920. Specifically, an ear is installed on each of the two opposite sides of the upper cover B920. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com