Obstacle evading method and device of intelligent robot
An intelligent robot and obstacle avoidance technology, applied in the computer field, can solve problems such as false triggering, poor camera imaging effect, and inability to cover a 180-degree field of view.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0046] In this implementation, a plurality of ultrasonic sensors (for example, can be arranged on the left and right sides of the front of the intelligent robot) and at least two deep Camera (for example, it can be set on the left and right sides of the front of the intelligent robot adjacent to the position of the ultrasonic sensor, etc.), wherein the position of the ultrasonic sensor and the depth camera can be set according to actual detection needs, so as to be suitable for detecting the intelligent robot It is advisable to walk on obstacles such as objects in front of you.
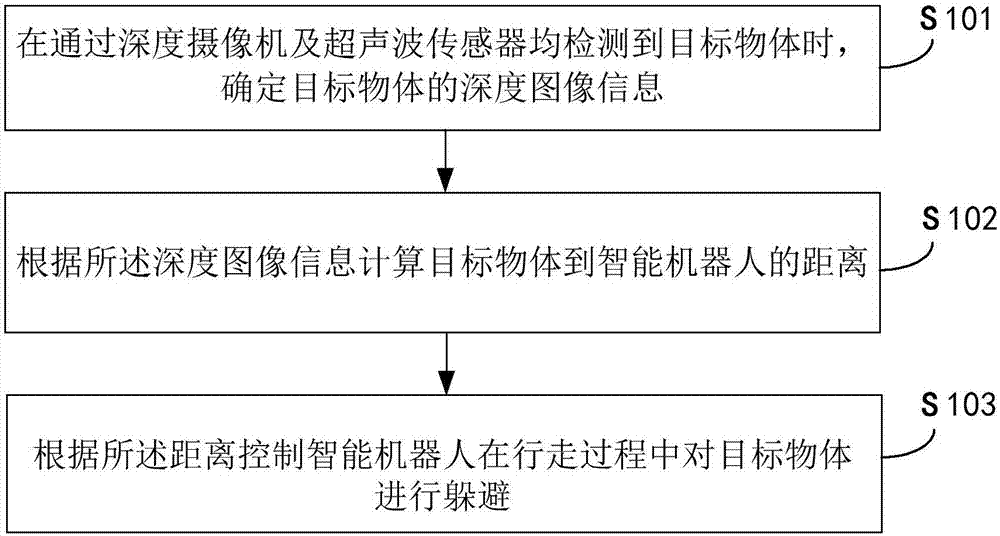
[0047] see figure 1 , this embodiment provides an obstacle avoidance method for an intelligent robot.
[0048] The method may include the steps of:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com