Mechanical-locking-based wire traction variable stiffness mechanism
A technology of mechanical locking and traction mechanism, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve the problems of insufficient response speed and insufficient stiffness of changes, and achieve simple design, realization of stiffness and movement, and simple driving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
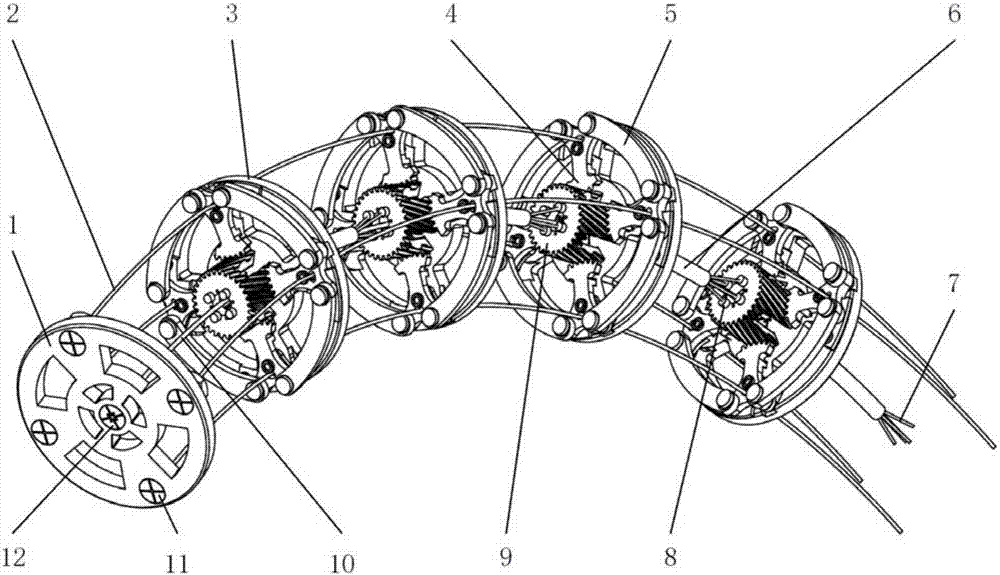
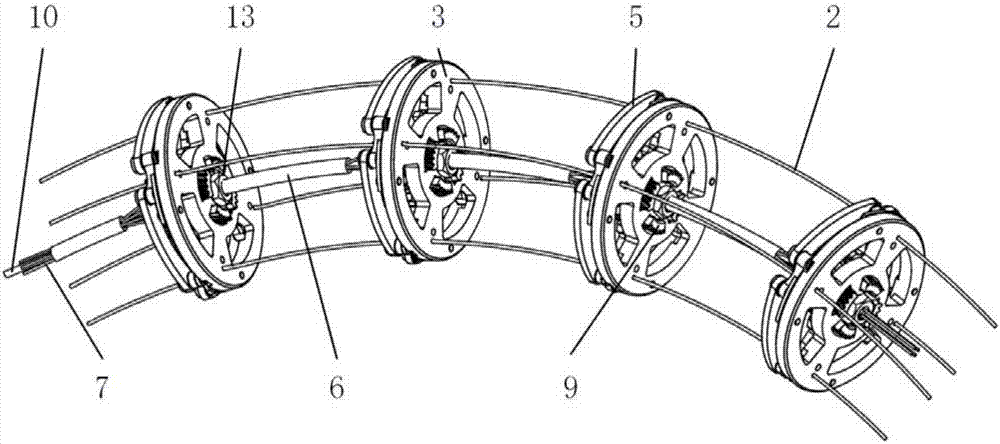
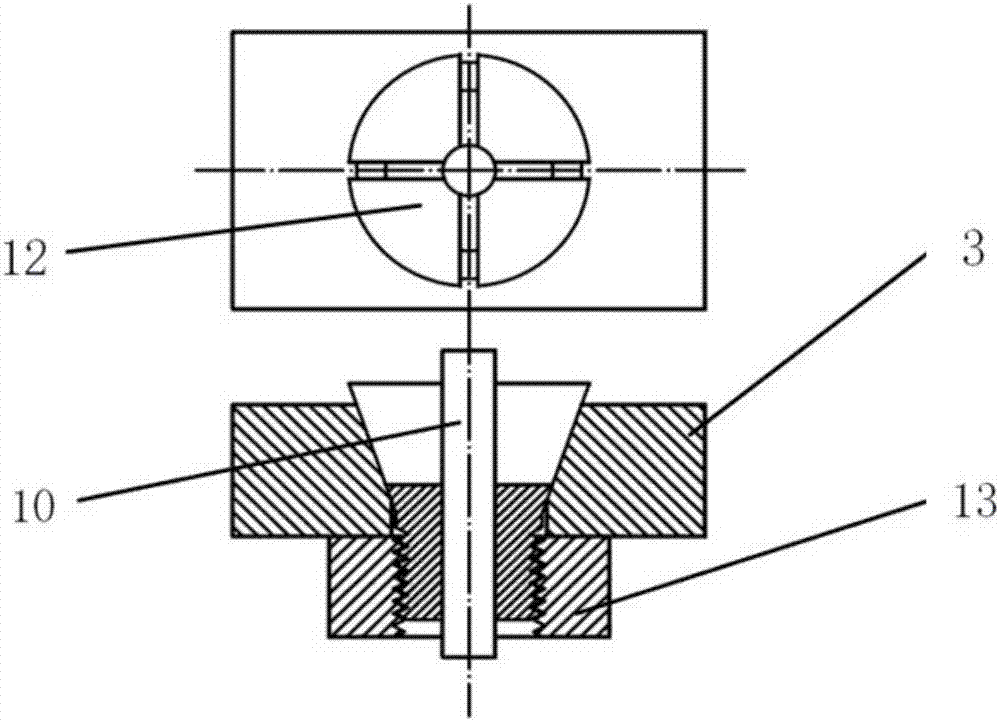
[0028] Such as Picture 1-1 and Figure 1-2 As shown, a wire traction variable stiffness mechanism based on mechanical locking includes the basic structure of a continuous robot, a variable stiffness locking mechanism and a variable stiffness traction mechanism. The basic structure of the continuous robot consists of a central wire 10 that connects all the connection plates in the joint in series, and the bending motion of the joint can be realized under the combined drive of the surrounding driving wire 2; Under the traction effect of 7, the driving wire 2 distributed around can be clamped, so that it is fixed relative to each connection plate, thereby changing the structural stiffness of the continuous robot, and playing a role in regulating the overall structural stiffness; the variable stiffness traction mechanism is used for conduction resistance The tension of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com