System and method for underwater submersible control based on binocular fisheye panoramic vision
A panoramic vision and submersible technology, applied in attitude control, signal transmission system, three-dimensional position/channel control, etc., can solve problems such as no integration of operation control methods, low operating efficiency, and limited field of view of monocular cameras, etc., to achieve convenient control experience, improve operational efficiency, and simplify control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings.
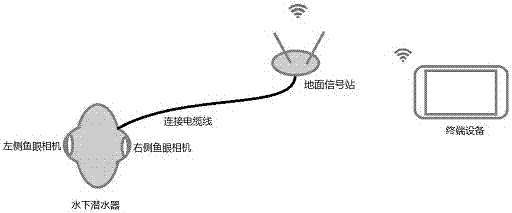
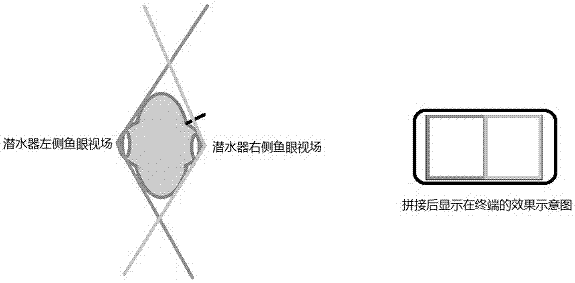
[0020] Such as figure 1 As shown, a system for controlling an underwater submersible based on binocular fisheye panoramic vision includes an underwater submersible, a ground signal station and a terminal device; the underwater submersible is connected with the ground signal station through a cable, and the The ground signal station is connected to the terminal equipment through a wireless network; the underwater submersible includes wide-angle fish-eye cameras on the left and right sides of the fuselage to obtain images of the surrounding environment; the wide-angle fish-eye cameras need to be calibrated before installation, and the left and right The distortion-corrected picture is transmitted to the ground signal station in real time through the cable, and then transmitted to the terminal equipment in the form of wireless signal by the ground s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com