


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Space five-degree-of-freedom mechanical arm
A technology of mechanical arms and degrees of freedom, applied in the field of robotics, can solve problems such as high cost, complex structure, and difficult operation, and achieve the effect of light weight, small space volume, flexible and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
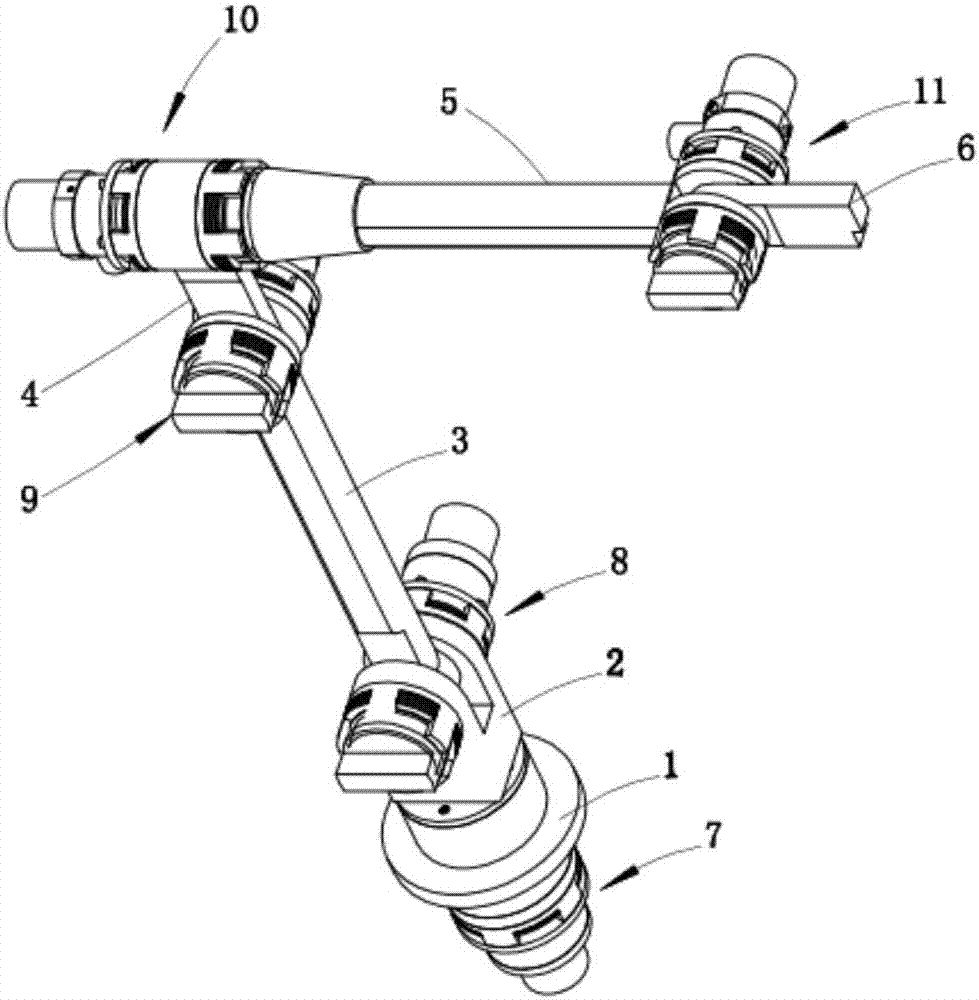
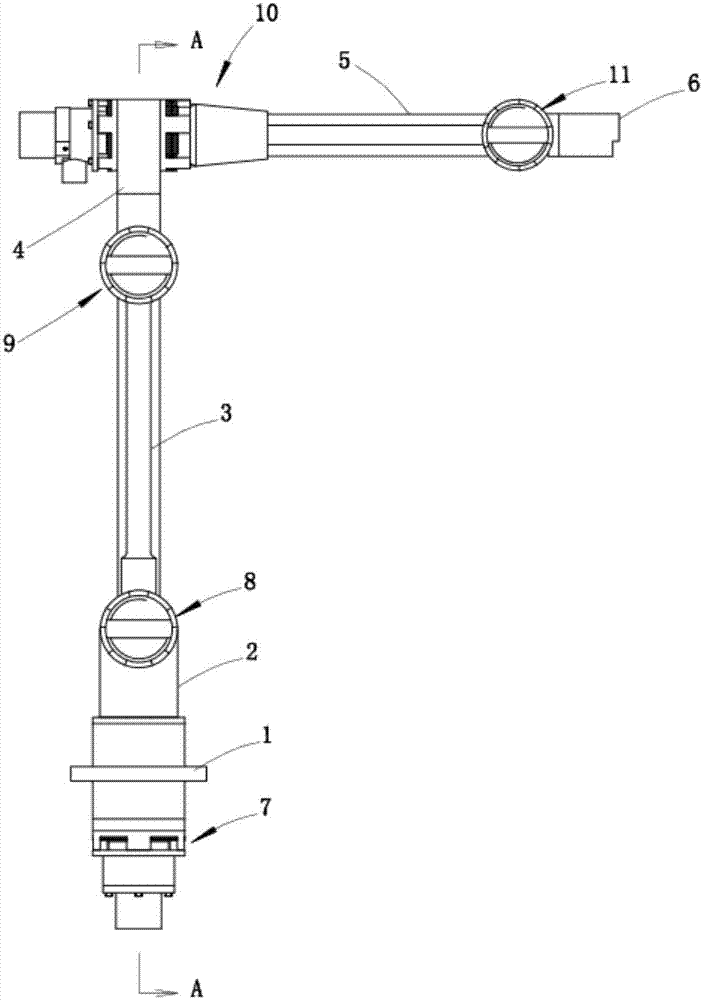
[0028] Such as figure 1 , figure 2 with image 3As shown, the present invention provides a mechanical arm with five degrees of freedom in space, comprising a base 1 on which a first arm 2 is rotatably mounted, the base 1 and the first arm 2 are coaxially arranged, and the first arm 2 and the first arm 2 are arranged coaxially. A first locking joint 7 is provided between the bases 1 (here, "between" should be understood as "between" in structure, rather than "between" in spatial position), and the end of the first arm 2 A second arm 3 is installed on the upper part of the swing, and a second locking joint 8 is provided between the second arm 3 and the first arm 2. The end of the second arm 3 is oscillatingly equipped with a third arm 4. A third locking joint 9 is provided between the three arms 4 and the second arm 3, and the end of the third arm 4 is rotated to be equipped with a fourth arm 5, and the third arm 4 is perpendicular to the fourth arm 5. Setting, a fourth lock...
Embodiment 2
[0030] The present invention provides a mechanical arm with five degrees of freedom in space. Its structure is basically the same as that of Embodiment 1. The difference is that, on the basis of Embodiment 1, the following features are added, and further improvements are made to improve the present invention. performance of the invention.
[0031] Such as Figure 4 As shown, the first locking joint 7 includes a first rotating shaft 701 whose end is fixedly installed on the first arm 2, and a first support seat 702 is fixedly installed on the side of the base 1 away from the first arm 2, and the first rotating shaft 701 runs through the base 1 and is rotatably mounted on the first support seat 702. The first support seat 702 is provided with a first hydraulic chamber 703, and a first piston 704 is slidably installed in the first hydraulic chamber 703. The base 1 is far away from the first support. A friction plate 707 is fixedly installed on one side of the arm 2, a first stop...
Embodiment 3
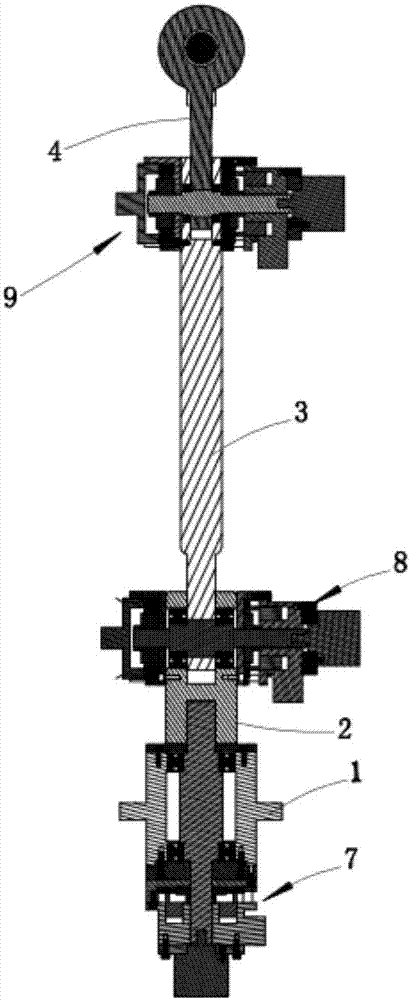
[0038] Such as Figure 4 , Figure 5 and Figure 6 As shown, the present invention provides a mechanical arm with five degrees of freedom in space, its structure is basically the same as that of Embodiment 1, the difference is that on the basis of Embodiment 2, the following features are added and further improvements are made, The use performance of the present invention is improved.
[0039] The first rotating shaft 701, the second rotating shaft 801, the third rotating shaft, the fourth rotating shaft 1001 and the fifth rotating shaft are all connected to the encoder 12, so as to collect relevant data (for example, swing or rotation angle), realize precise control, and improve automation To a certain extent, the installation method of the encoder 12 is a technical means commonly used by those skilled in the art, and will not be repeated here.
[0040] The overall structural design of the robotic arm is modeled on the human arm, which makes it easier for the operator to o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com