High-altitude fire-breathing obstacle removal robot
A technology for robots and firearms, applied in the direction of overhead lines/cable equipment, etc., can solve the problems affecting the reliable operation of the power grid and the normal power consumption of the society, the workload of handling and installation is large, and the safety is difficult to be guaranteed. Compact and burden-reducing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to be able to understand the technical content of the present invention more clearly, the following embodiments are specifically described in detail, the purpose of which is only to better understand the content of the present invention and not to limit the protection scope of the present invention.
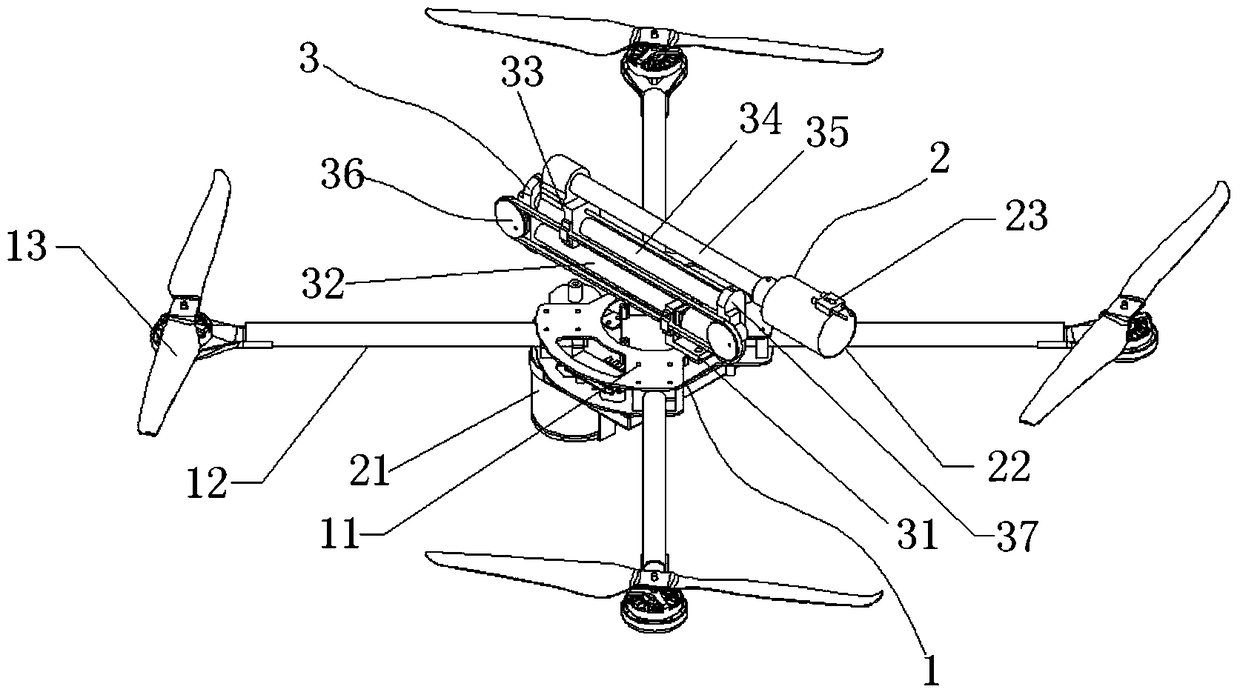
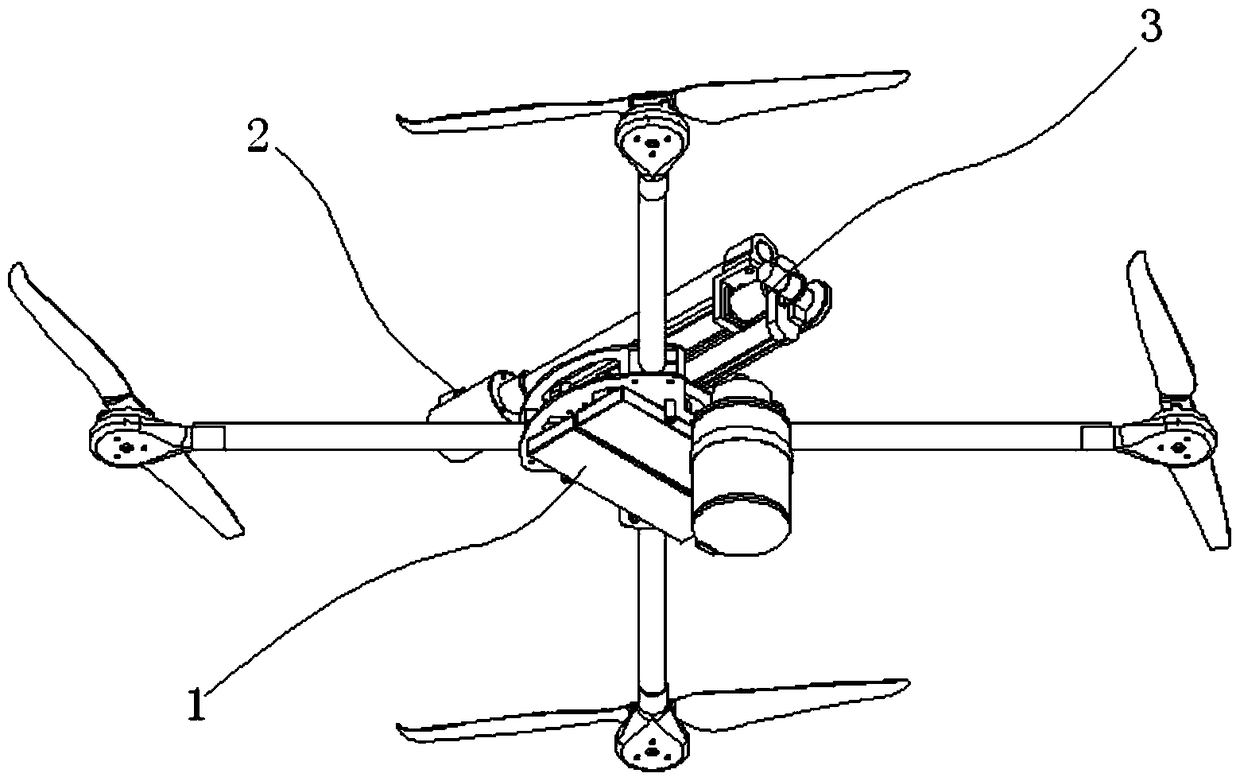
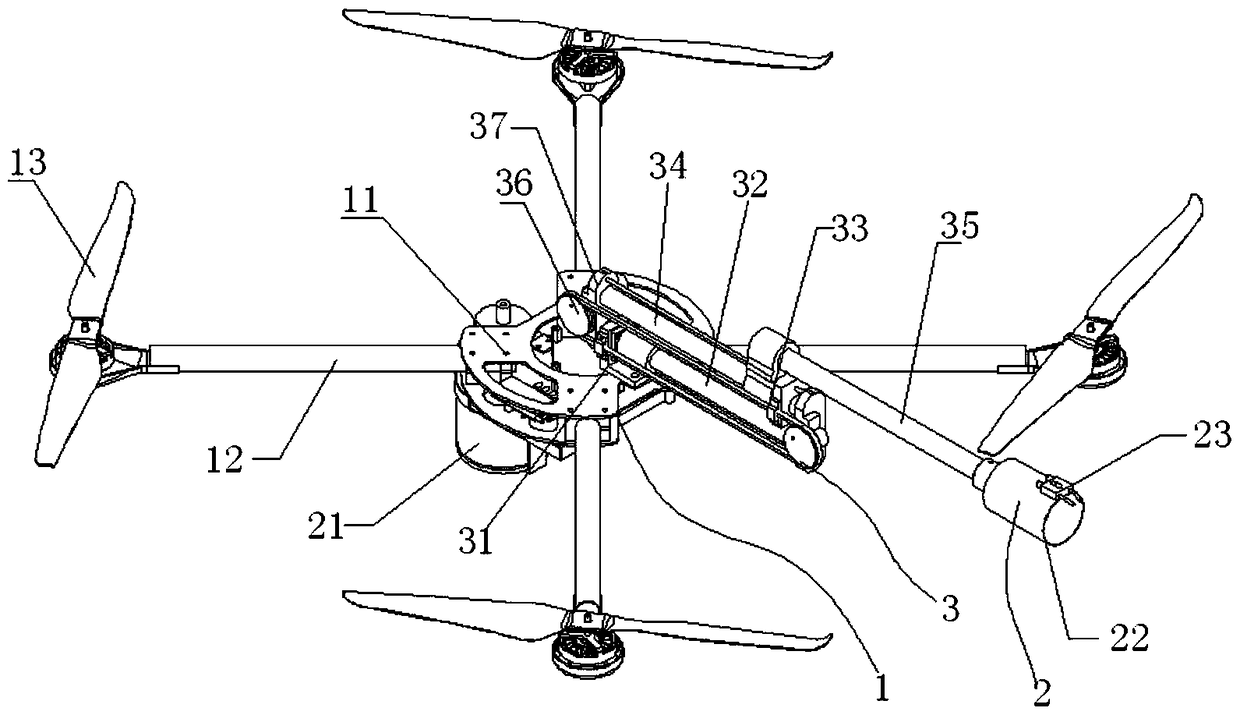
[0031] Such as figure 1 , figure 2 , image 3 with Figure 4 As shown, a high-altitude fire-breathing obstacle-removing robot includes a multi-axis aircraft 1 and a fire-spitting system 2. The multi-axis aircraft includes a main frame 11, and the fire-spitting system includes a pressurized fuel tank 21, a nozzle 22, and a high-pressure fuel tank. The igniter 23, after the pressurized fuel in the pressurized fuel storage tank is atomized by the nozzle, can be ignited by the high-pressure igniter, and also includes a two-stage telescopic mechanism 3, the two-stage telescopic mechanism includes a first-stage slide The block 31, the primary guide rail 32, the secondary s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com