UWB-based mine unmanned locomotive high accuracy positioning system and method
A technology of positioning system and positioning method, applied in the direction of radio wave measurement system, positioning, measuring device, etc., which can solve the problems of unstable channel transmission and inaccurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
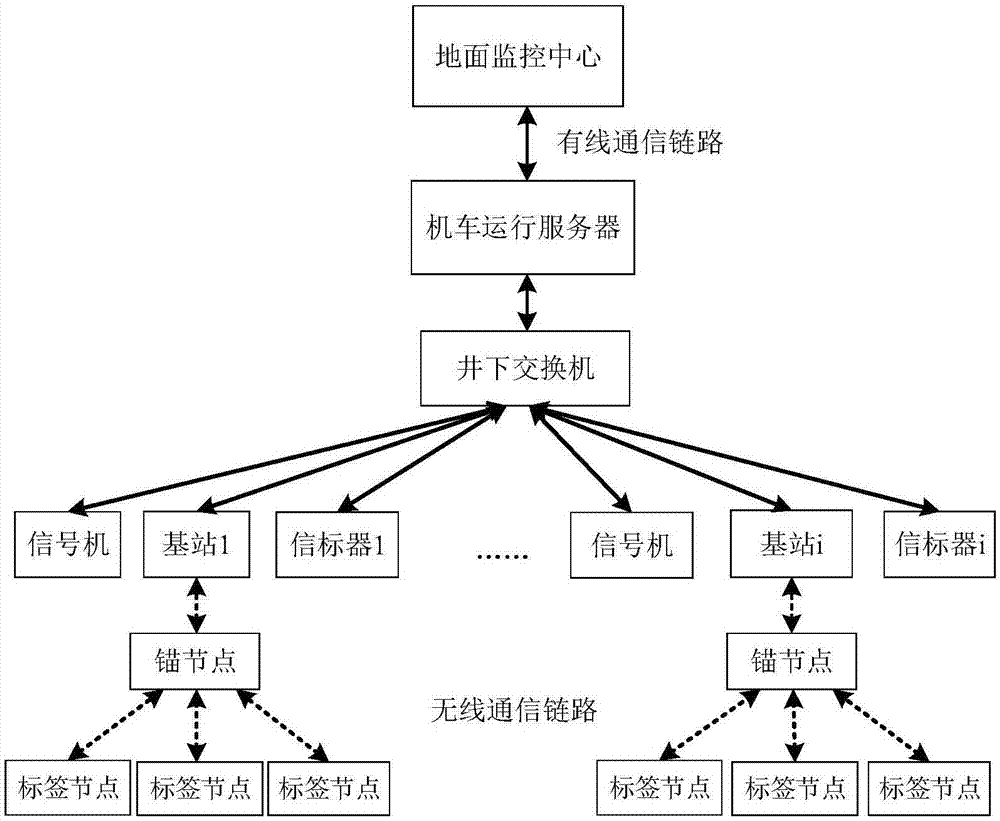
[0040] Such as figure 1 As shown, a UWB-based mine UAV vehicle high-precision positioning system, including:
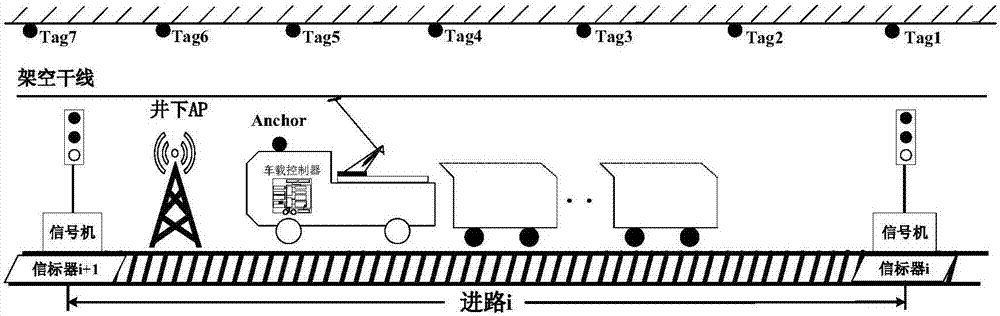
[0041] A number of UWB tag node Tags are respectively set in the mine as UWB signal transmitters, and the coordinates of each UWB tag node Tag are known and assigned with corresponding ID numbers;
[0042] UWB anchor node Anchor, which is set on the locomotive in the mine as a UWB signal receiver, the UWB anchor node Anchor receives the pulse signal sent by each UWB tag node Tag in real time, and records the arrival time of the pulse signal and the UWB tag corresponding to the pulse signal Coordinate data of node Tag;
[0043] AP equipment, which is arranged in the mine, and the UWB tag node Tag and UWB anchor node Anchor are respectively connected to the AP equipment through wireless communication;
[0044] Each approach has at least one signal machine. The signal machine mainly displays whether the current route is open to allow the entry of grade vehicles. The si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com