Laser processing apparatus, laser processing method and distance measurement method
A laser processing and distance technology, applied in measuring devices, laser welding equipment, metal processing equipment, etc., can solve problems such as inability to measure, measure distance errors, and inability to measure the distance between the processing point and the sound sensor.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
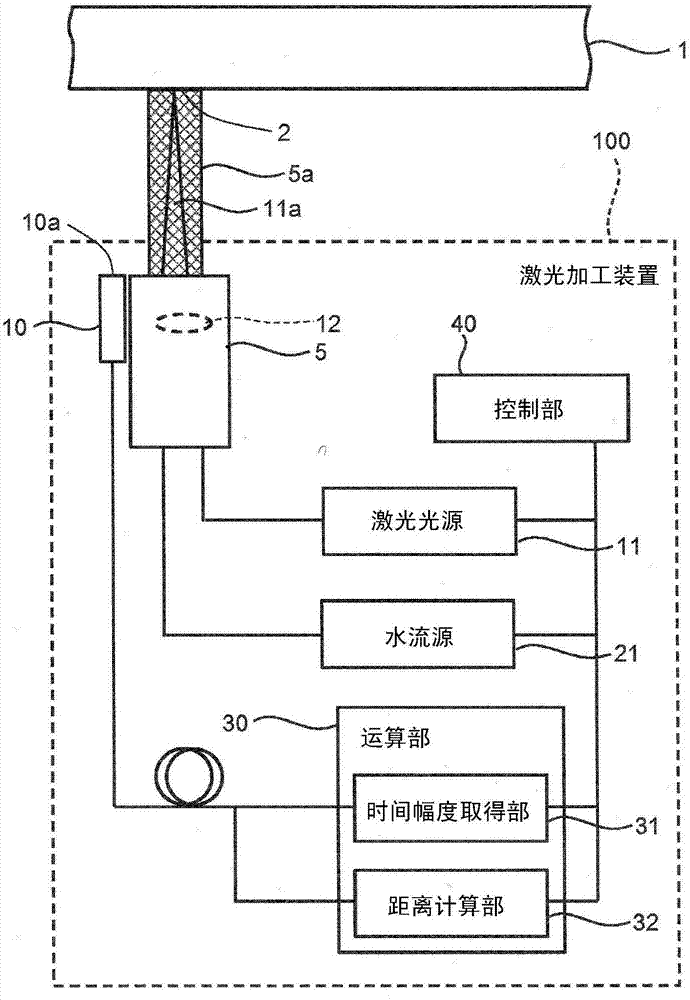
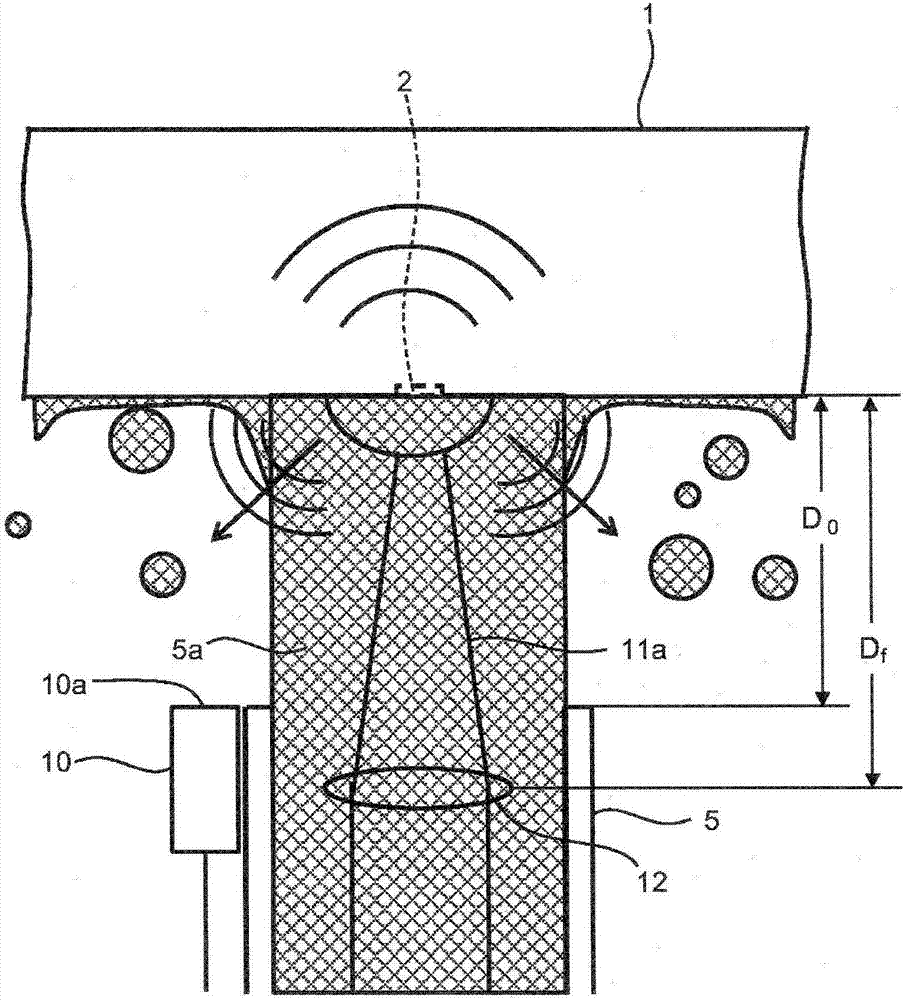
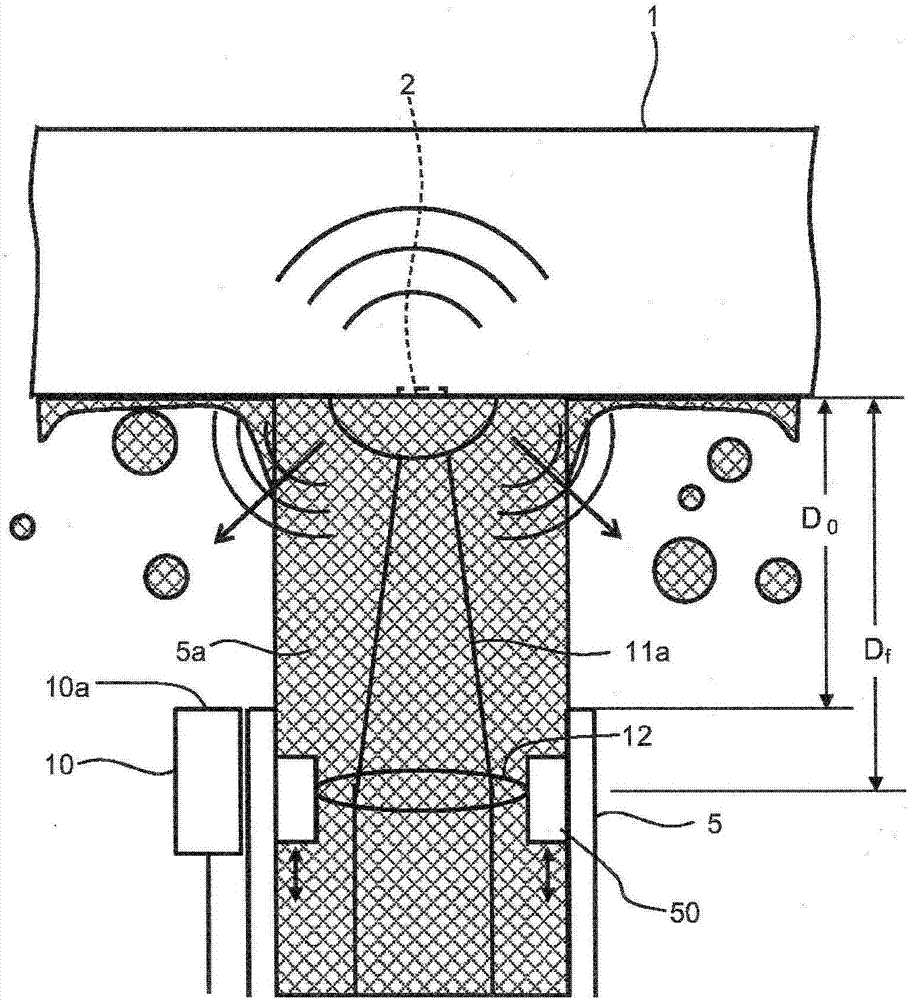
[0072] figure 1 It is a block diagram showing the structure of the laser processing apparatus of 1st Embodiment. A laser processing device (laser irradiation device) 100 irradiates a laser beam to a workpiece 1 in a gas atmosphere such as an air atmosphere to perform surface hardening treatment. Any one of a plurality of construction target sites specified on the workpiece 1 as the construction target is selected as an irradiation target site, and laser irradiation is performed respectively. The laser processing device (laser irradiation device) 100 has a laser light source 11, a water flow source 21, a water flow transmission part 5, a calculation part 30, a control part 40, an acoustic sensor 10, and a focusing distance adjustment part 50 ( image 3 ), and the mobile drive unit 90 ( Figure 4 , Figure 5 ). A focusing unit 12 for converging laser light 11 a irradiated toward the workpiece 1 is attached to the water flow transmission unit 5 .
[0073] The laser light so...
no. 2 approach
[0118] Figure 12 It is a schematic longitudinal sectional view showing the structure of the laser processing apparatus of 2nd Embodiment. This embodiment is a modification of the first embodiment. The laser processing apparatus 100 of this embodiment has a photodetector 13 .
[0119] Even when the repetition is repeated at a constant cycle, the excitation of the laser light sometimes has jitters, that is, wobbling and turbulence, on the order of several μs. By using the photodetector 13 to detect the actual light emission timing, and using the timing of the detection signal as Ti, the propagation distance D can be increased. p Then the focusing distance D f The accuracy of the measurement.
no. 3 approach
[0121] Figure 13 It is a schematic longitudinal sectional view showing the structure of the laser processing apparatus of 3rd Embodiment. This embodiment is a modification of the first embodiment. The laser processing apparatus 100 of this embodiment has two acoustic sensors 15a, 15b. In addition, the number of acoustic sensors may be three or more.
[0122] Figure 14 It is a schematic longitudinal sectional view for explaining the measurement of the construction distance. Shock waves are now emitted from the processing point 2 and reach the two sound sensors 15a, 15b. Let the distance between the processing point 2 calculated from the propagation time to the acoustic sensor 15a and the receiving portion of the acoustic sensor 15a be D1. From this it can be concluded that the machining point 2 exists on a spherical surface with a radius D1 from the receiving portion of the acoustic sensor 15a. Similarly, let the distance between the processing point 2 calculated from t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com