A Reconfigurable Industrial Robot Programming Control Method in Distributed Manufacturing Environment
A technology for industrial robots and manufacturing environments, applied in program control, comprehensive factory control, electrical program control, etc., can solve problems such as difficulty in adapting to new manufacturing models, lack of distributed systems to effectively describe system reconfiguration, etc., to improve flexibility, improve The effect of efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
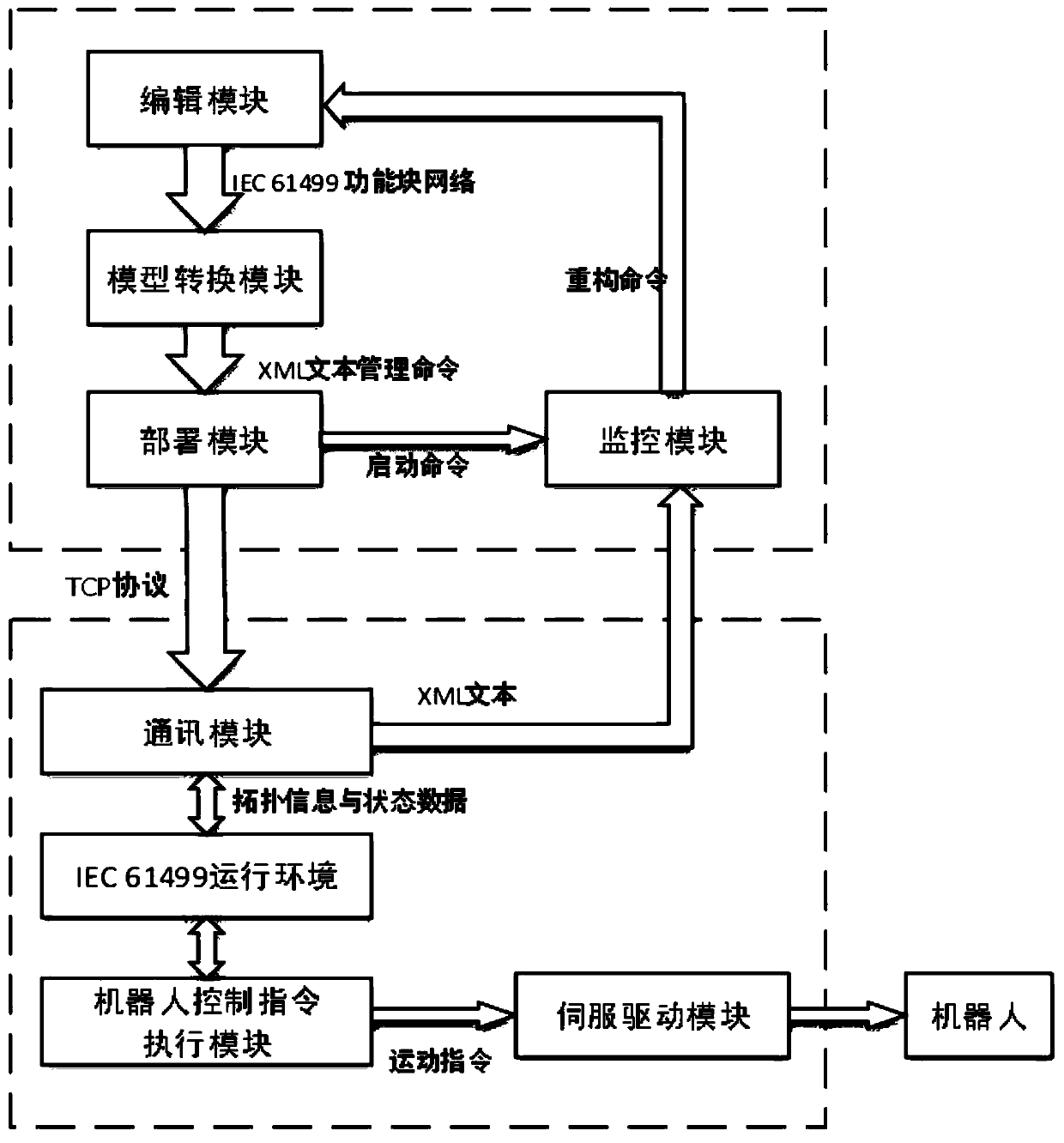
[0031] Such as Figures 1 to 3 shown. The invention discloses a reconfigurable industrial robot programming control method in a distributed manufacturing environment, which includes an editing module, a model conversion module, a deployment module, a communication module, an IEC 61499 operating environment, a robot control instruction execution module, and a telecommunications connection sequentially. Servo drive module, robot;
[0032] The deployment module is telecommunications connected to the monitoring module, and the monitoring module is connected to the editing module;
[0033] The communication module is telecommunications connected to the monitoring module;
[0034] The programming control method can be realized through the following steps:
[0035] 1) Through the editing module, in the editing interface of the application development environment, in the form of a function block network conforming to the IEC 61499 international standard, the work task logic and com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com