Residual oscillation suppression method for flexible manipulator
A flexible robotic arm and residual vibration technology, applied in the field of robotics, can solve problems such as poor effects and achieve simple, easy-to-implement, and robust effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below with reference to the accompanying drawings and in combination with preferred embodiments.
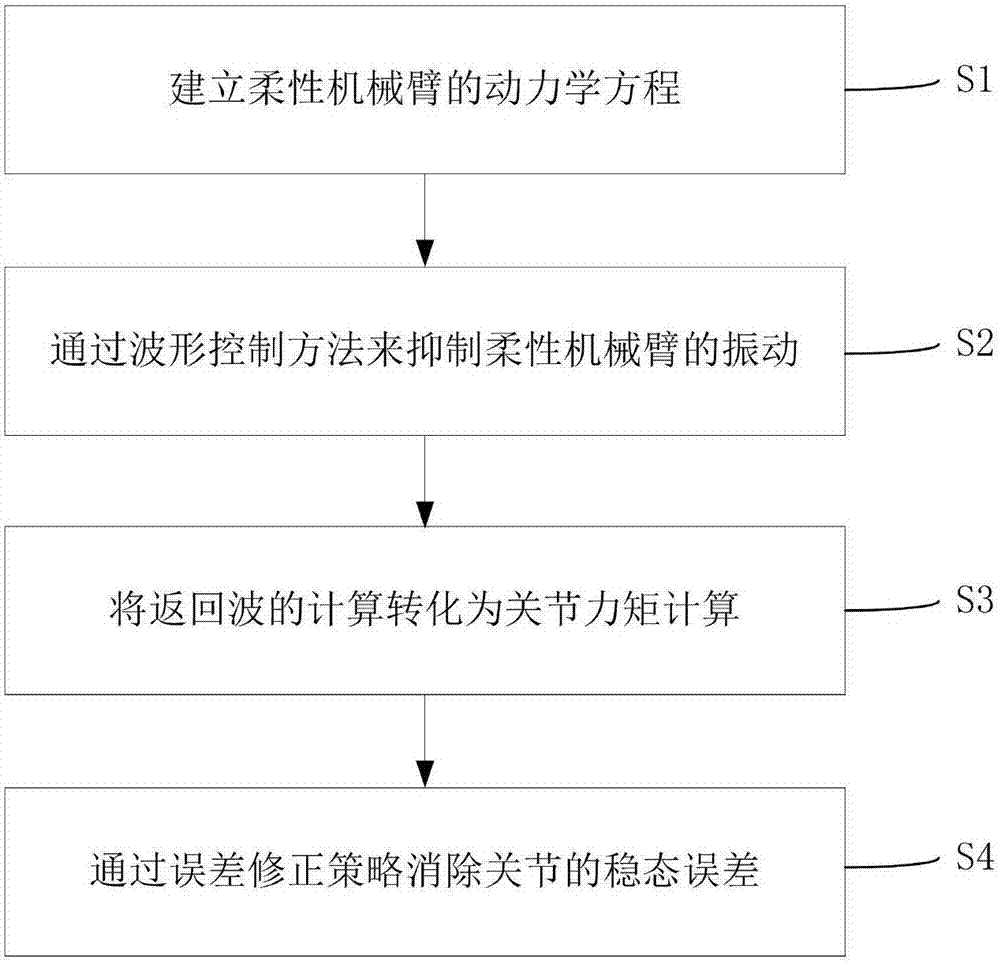
[0060] Such as figure 1 As shown, the residual vibration suppression method of the flexible manipulator of the preferred embodiment of the present invention includes the following steps:
[0061]S1: Establish the dynamic equation of the flexible manipulator, including:
[0062] S11: Establish the dynamic equation of rigid joint-flexible manipulator:
[0063] From the kinetic energy and potential energy of the system, using the Lagrangian equation, after derivation, the dynamic equation of the rigid joint-flexible manipulator is obtained as:
[0064]
[0065] Among them, M 11 , M 22 is the inertia matrix of boom 1 and 2, M 12 is the coupling inertia matrix between the two arms, k is the equivalent stiffness of the arms, is the coupling matrix including Coriolis force and centrifugal force, q is the rotation angle of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com