A Motion Trajectory Control Method of Quadruped Robot Based on PSO-PD Neural Network
A PSO-PD, quadruped robot technology, applied in the field of quadruped robot motion trajectory control based on PSO-PD neural network, achieves the effects of high control accuracy, satisfying control requirements, and good control requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0100] A method for controlling motion trajectory of a quadruped robot based on PSO-PD neural network, comprising:
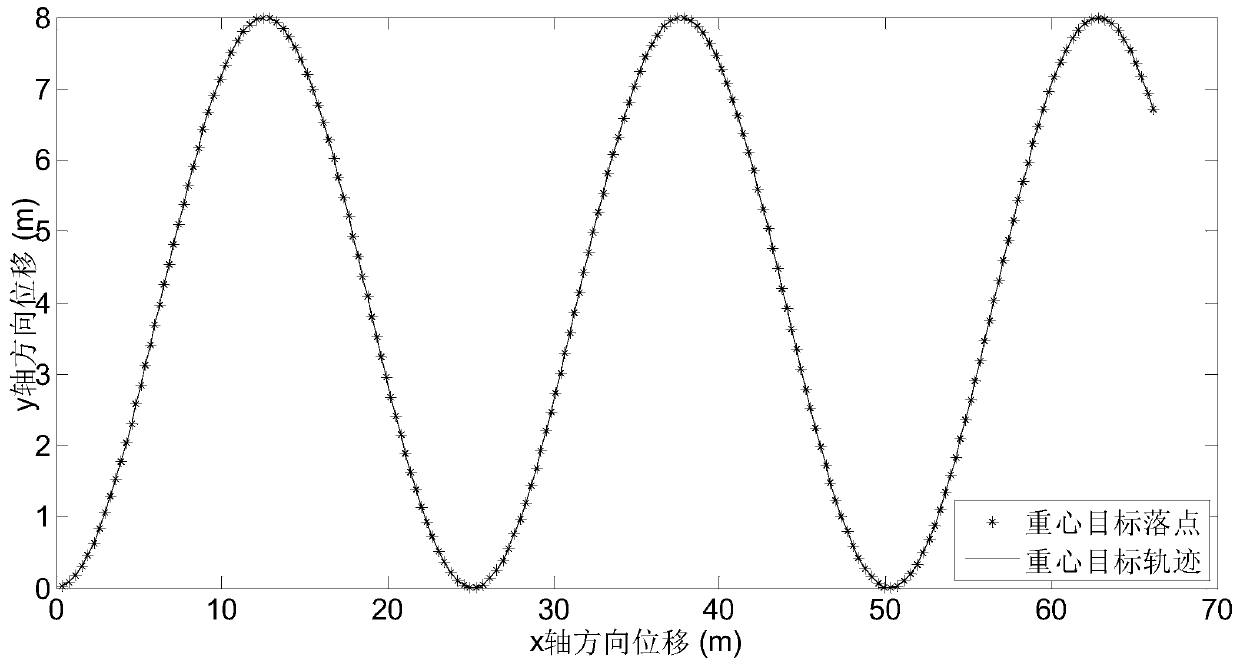
[0101] (1) According to the trajectory of the quadruped robot and the preset step size, the target landing point of the center of gravity of the quadruped robot on the trajectory is obtained, that is, the coordinates of the center of gravity of the quadruped robot on the trajectory; it is relative to the actual result spoken.
[0102] (2) The target landing point of the center of gravity of the quadruped robot obtained in step (1) on the motion trajectory, and the real-time feedback position of the center of gravity of the torso (y x ,y y ) into the input layer of the PD neural network model; enter the first hidden layer of the PD neural network model after linear transformation, and perform proportional and differential operations in the first hidden layer; enter the second hidden layer of the PD neural network model after linear transformation again Hidden l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com