AGV steering mechanism
A steering mechanism and steering wheel technology, applied in steering mechanisms, electric steering mechanisms, power steering mechanisms, etc., can solve the problems of inability to converge errors, large vibration amplitude of the car body, lag in the PID control integral term, etc., to ensure accuracy and reliability. Effectiveness, avoid large vibration, ensure the effect of running stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Objects, advantages and features of the present invention will be illustrated and explained by the following non-limiting description of preferred embodiments. These embodiments are only typical examples of applying the technical solutions of the present invention, and all technical solutions formed by adopting equivalent replacements or equivalent transformations fall within the protection scope of the present invention.
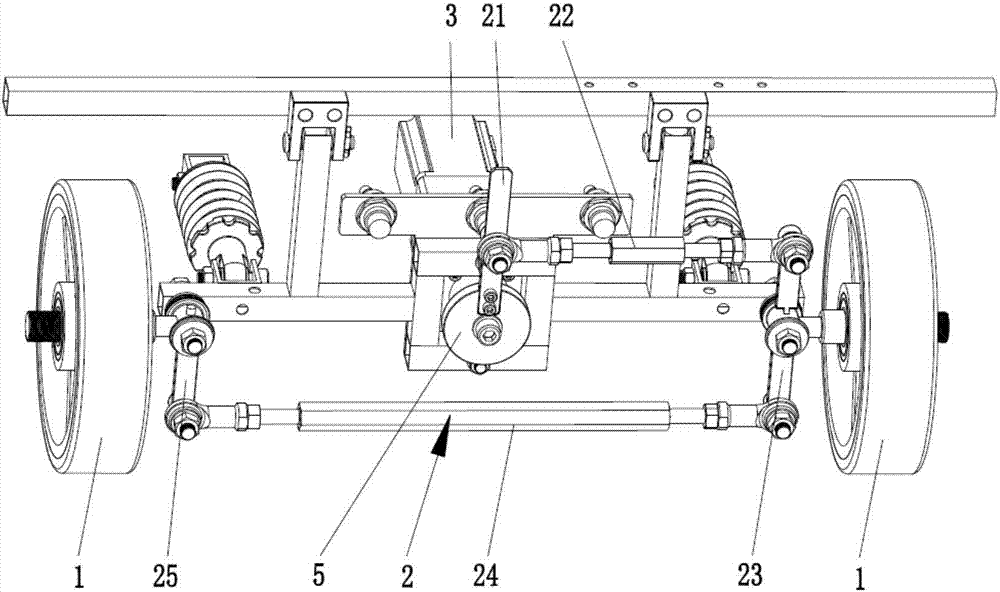
[0032] The invention discloses an AGV steering mechanism, as attached figure 1 As shown, it includes a pair of shaft co-steering wheels 1, the projections of a pair of said steering wheels 1 on the same plane parallel to them coincide, and a pair of said steering wheels 1 are connected by a steering connection mechanism 2 driven by a single motor 3 and move synchronously in the same direction, the part of the steering connection mechanism 2 connected with the two steering wheels 1 can rotate, and in the non-steering state, the two parallel rotation a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com