An automatic deviation correction method based on UAV in parking lot scene
An automatic deviation correction and UAV technology, applied in computer parts, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of lengthy, complex knowledge base establishment, and inability to guarantee the indoor positioning of UAVs. , to achieve the effect of reducing complexity and cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
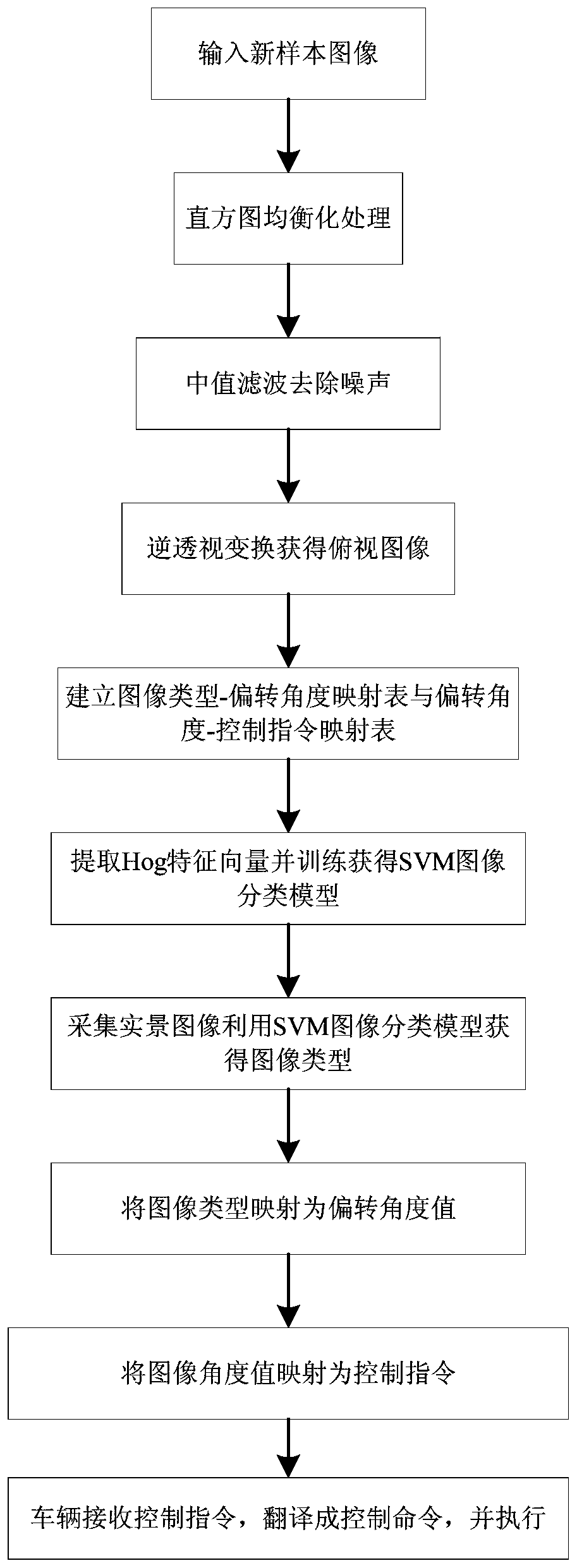
[0072] A total of 85,000 images of vehicles with different deflection angles were collected, and processed by steps 1 to 3 to obtain processed images; then, image type-deflection angle mapping tables and deflection angle-control command mapping tables were established, as shown in Table 1 and Table 2 shows:
[0073] Table 1
[0074] image type deflection angle image type deflection angle image type deflection angle L1 Left deviation 1°~5° R1 1°~5° to the right T 0° L2 Left deviation 6°~10° R2 6°~10° to the right FL Left deviation greater than 35° L3 Left 11°~15° R3 11°~15° to the right FR Right deviation greater than 35° L4 Left deviation 16°~20° R4 16°~20° to the right L5 Left deviation 21°~25° R5 21°~25° to the right L6 Left 26°~30° R6 26°~30° to the right L7 Left deviation 31°~35° R7 Right deviation 31°~35°
[0075] Table 2
[0076] deflection angle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com