Method for extracting single tree information from LiDAR point cloud in layered clustering mode
A hierarchical clustering and clustering center technology, applied in character and pattern recognition, instruments, computer components, etc., can solve problems such as lack of single tree information, difficulty in extracting lower forest trees, and unsound forest stand structure inversion functions , achieve the effects of great significance, improvement of extraction ability, and improvement of work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
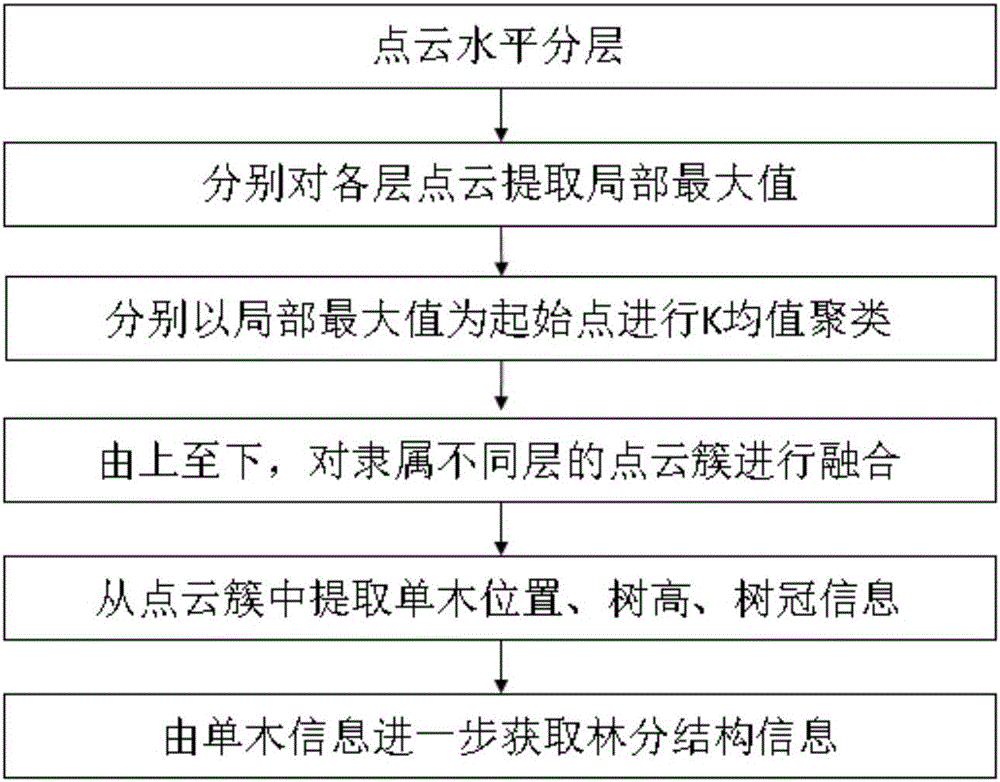
[0041] In order to clearly illustrate the technical features of this solution, the present invention will be described in detail below through specific implementation modes and in conjunction with the accompanying drawings. The present invention: a method for extracting single tree information from LiDAR point clouds using hierarchical clustering, the main steps are set as figure 1 As shown, the method includes the following steps:
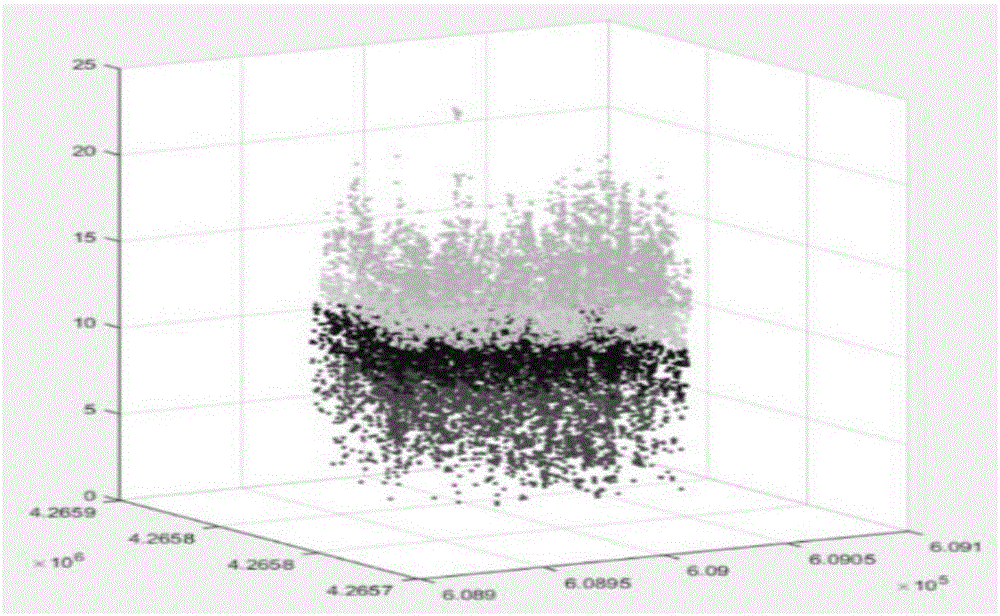
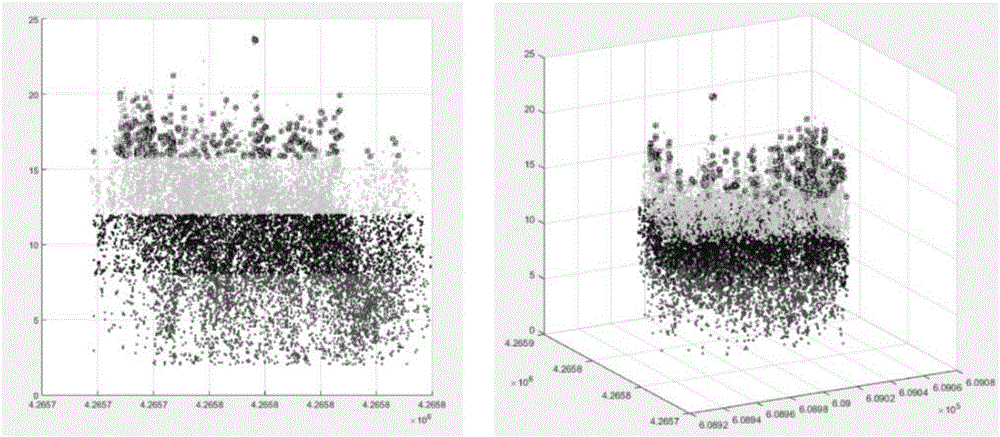
[0042] Step 1: Slice the point cloud horizontally; horizontally slice all the point clouds using the point cloud high percentile method to ensure that the number of point clouds contained in each point cloud layer is equal; the number of slices N is based on the canopy density of the stand , The complexity of the stand structure can be changed, the single-layer artificial forest N can be set at about 3-5; the natural forest can be set at about 5-10; the slice effect is as follows figure 2 shown;
[0043] Step 2: Extract the local maximum positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com