Robust fault tolerant control method for multi-time-delay quadrotor helicopter flight control system
A robust fault-tolerant, flight control system technology, applied in the field of robust fault-tolerant control and robust fault-tolerant control of time-delay uncertain discrete systems, can solve the problems of difficult fault-tolerant control, system instability, and few, etc. Avoid slow convergence and eliminate chattering effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further explained below in conjunction with the accompanying drawings.
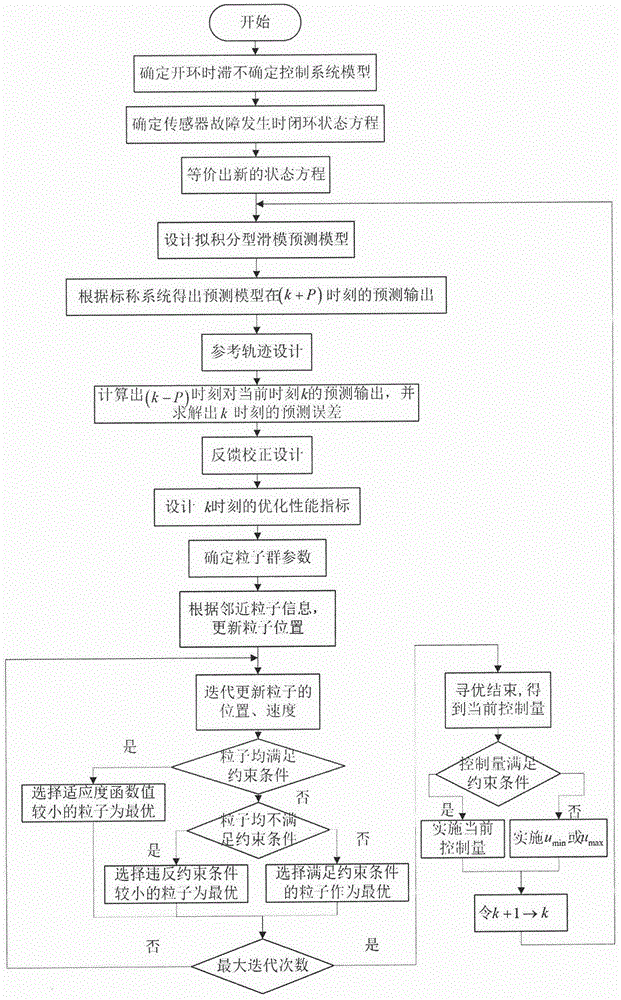
[0063] Such as figure 1 As shown, a robust fault-tolerant control method for multi-time-delay quadrotor helicopter flight control system, this method combines the design ideas of sliding mode control and predictive control, and constructs a quasi-integral sliding mode prediction model, which can ensure the system Global robustness in the presence of multiple time-delays; based on the particle swarm optimization algorithm, the rolling optimization process is improved. This method can not only quickly and accurately solve the control law that satisfies the input constraints, but also effectively avoids the traditional particle In the optimization process, it is easy to fall into the problem of local extreme points and slow convergence speed; through the reference trajectory containing compensation items, the influence of system uncertainty, multi-time lag and sensor fail...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com