Switching system-based modeling and adaptive control method for cargo handling unmanned gyroplane
A technology of adaptive control and adaptive controller, which is applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems affecting flight stability, UAV movement mode interference, etc., to achieve accurate Grab and deliver, solve large quality parameter mutations, and ensure the effect of system stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
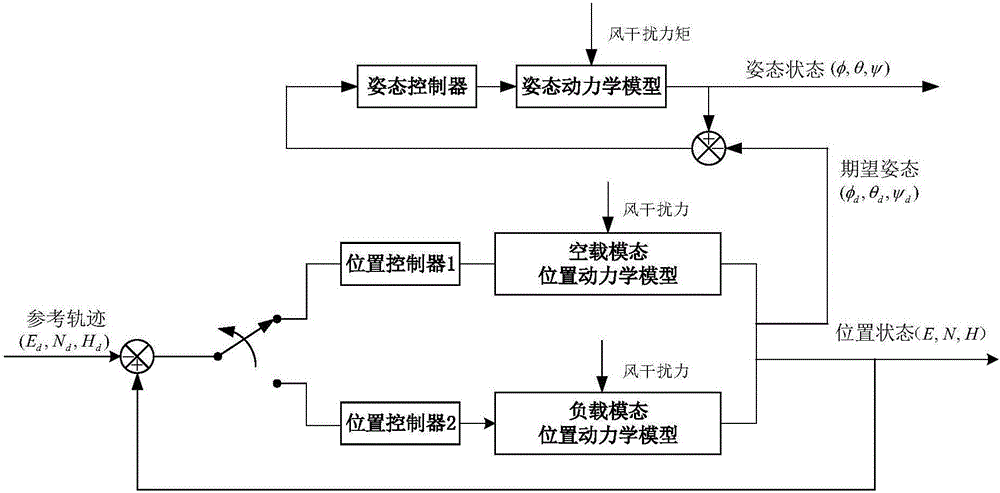
[0021] Specific implementation one: as figure 1 and figure 2 As shown, a cargo handling rotor UAV modeling and adaptive control method based on a switching system includes the following steps:
[0022] Aiming at the modal switching phenomenon caused by the sudden change of mass parameters in the cargo handling task, the cargo handling process is considered to be divided into two modes: no-load mode and load mode, and based on this, a switching system modeling method is proposed.
[0023] The switching adaptive controller is designed for the two sub-modes of the no-load mode and the load mode. Considering the wind disturbance and inertia parameter uncertainty of the UAV system, robust control and adaptive parameter estimation are used respectively. The method is solved, and considering that the UAV needs to realize the grabbing and delivery of goods at the switching time, and use the limited time control to realize the limited time trajectory tracking;
[0024] A strict stab...
specific Embodiment approach 2
[0035] Embodiment 2: The difference between this embodiment and Embodiment 1 is that: the specific process of establishing the position dynamics switching model of the cargo handling quadrotor UAV in the step 1 is as follows:
[0036] Consider dividing the cargo handling process into two modes: no-load and loaded. The time period from the initial moment of the drone to the moment of cargo grabbing is called the no-load mode, and the time period from the moment of cargo grabbing to the moment of cargo delivery is called the no-load mode. called the load mode.
[0037] The position dynamics switching model of the cargo handling quadrotor UAV is established as:
[0038]
[0039] where the m i , i=1,2 represents the quality parameters of the two sub-modes of the UAV, m 1 =m represents the mass of the UAV, m 2 =m+Δm represents the total mass of the drone and the cargo, g is the acceleration of gravity, T represents the total pulling force of the rotor, E, N, H represent the x...
specific Embodiment approach 3
[0046] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that: the specific process of determining the attitude dynamics model of the cargo handling quadrotor UAV in the second step is:
[0047] The attitude dynamics model of the cargo handling quadrotor UAV considering the external wind disturbance moment can be modeled as:
[0048]
[0049] Among them, p, q, r are the coordinates of the angular velocity of the quadrotor UAV in the body coordinate system of the x-axis, y-axis and z-axis, τ φ ,τ θ ,τ ψ Represents the components of the control torque generated by the rotor in the x-axis, y-axis and z-axis in the body coordinate system, τ w,φ ,τ w,θ ,τ w,ψ Represents the components of the external wind disturbance moment in the x-axis, y-axis and z-axis of the body coordinate system, I r represents the moment of inertia of the rotor, Indicates the rotor speed under the 4-rotor UAV system, Ω σ Represents the rotational speed of the σth rotor, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com