Real-time image splicing method for police unmanned aerial vehicle investigation and evidence obtaining
A UAV, image technology, applied in image enhancement, image analysis, image data processing and other directions, can solve the problem of not taking into account the difference of the salient features of the image, not having scale invariance, etc., to achieve the effect of improving the matching rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The present invention will be further elaborated below in conjunction with the accompanying drawings and specific embodiments.
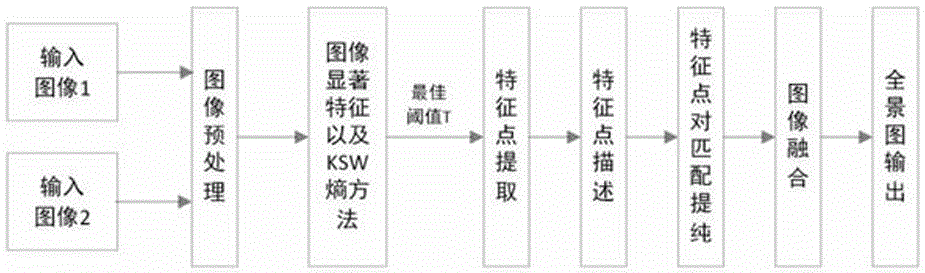
[0046] combine figure 1 First, let’s understand what is the ORB algorithm. The ORB algorithm combines the FAST feature point detection method with the BRIEF feature descriptor, and has been improved and optimized. This invention mainly introduces the feature point detection and feature point description of the algorithm. part.
[0047] 1) Feature point detection
[0048] The ORB algorithm uses a Gaussian pyramid structure and calculates its main direction for each feature point, so that the detected feature points have scale invariance and rotation invariance.
[0049] (1) First establish a scale space and construct an image pyramid. Unlike SIFT, each layer has only one image.
[0050] (2) Calculate the number n of feature points that need to be extracted for each layer according to the formula, use the FAST algorithm to detect feature poin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com