Method and apparatus for recognizing lane line
An identification method and a technology of an identification device are applied in the field of lane line identification methods and devices, and can solve problems such as difficulty in lane line fitting and identification, inability to exclude lane lines, and potential safety hazards.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
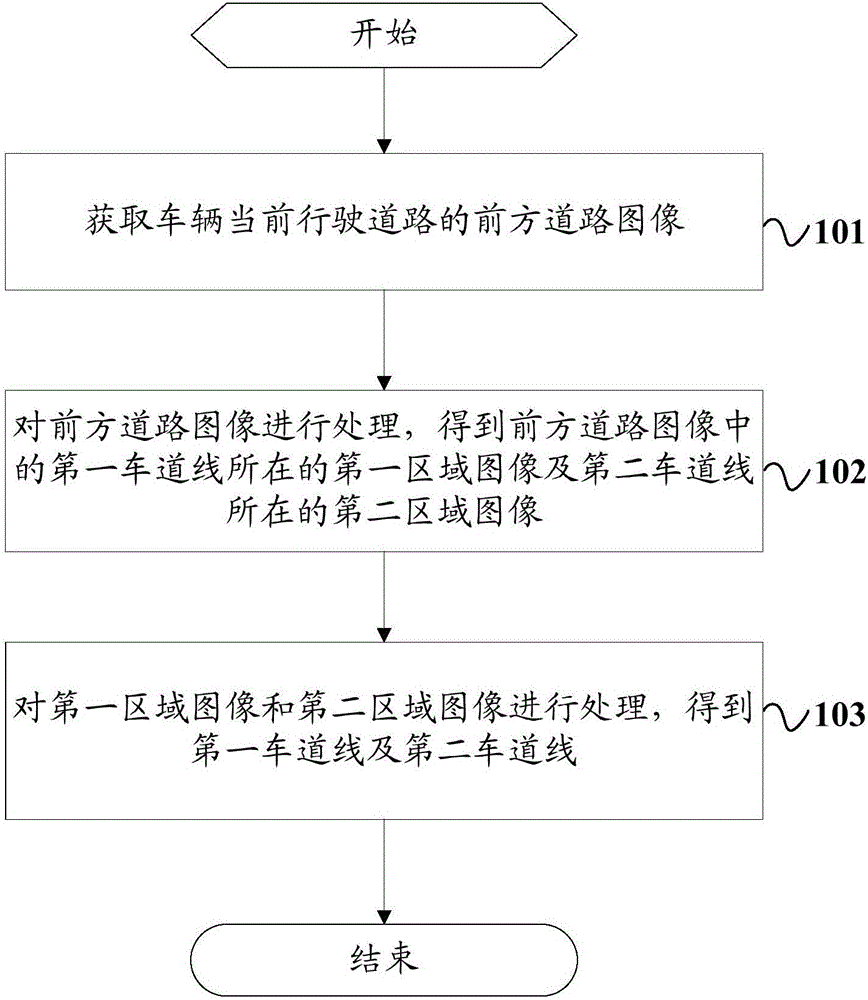
[0087] The embodiment of the present invention discloses a lane line recognition method, combining figure 1 shown, including:
[0088] Step 101 , acquiring an image of the road ahead of the road the vehicle is currently traveling on.
[0089] The acquisition of the front road image can be collected by the camera device in the machine vision sensor in the car, specifically can be collected by installing a camera on the front of the car, and in order to make the machine vision sensor and the camera device can collect effective front road images , which is preferably set at the center of the front of the car.
[0090] Step 102, processing the image of the road ahead to obtain a first region image where the first lane line is located and a second area image where the second lane line is located in the road ahead image.
[0091] Wherein, the first lane line is specifically the left lane line constituting the lane, the second lane line is the right lane line constituting the lane...
no. 2 example
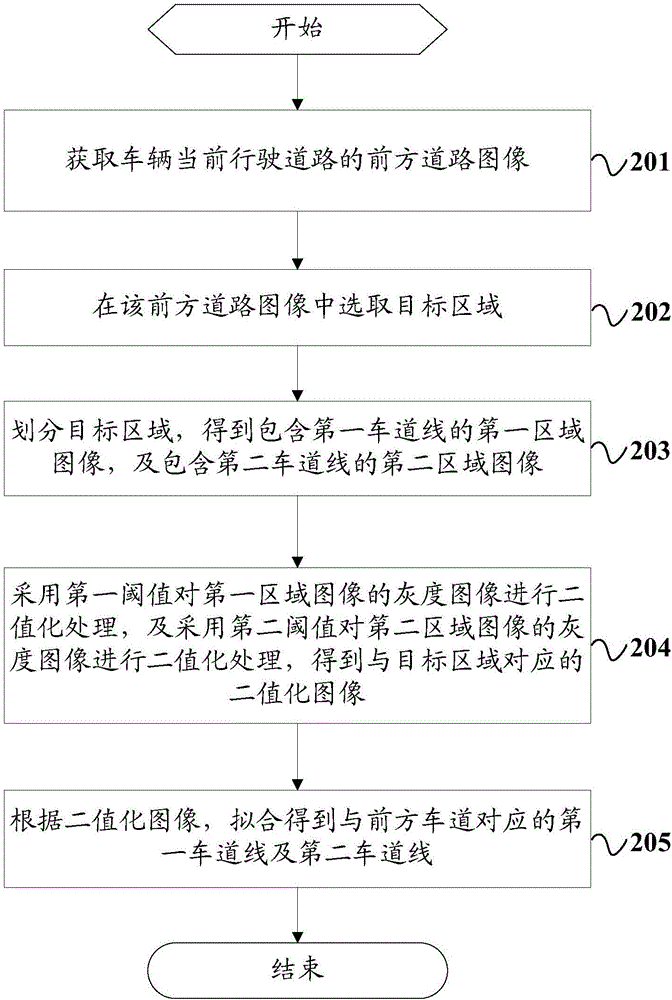
[0114] The embodiment of the present invention discloses a lane line recognition method, combining figure 2 shown, including:
[0115] Step 201 , acquiring a road ahead image of the road the vehicle is currently traveling on.
[0116] The acquisition of the front road image can be collected by the camera device in the machine vision sensor in the car, specifically can be collected by installing a camera on the front of the car, and in order to make the machine vision sensor and the camera device can collect effective front road images , which is preferably set at the center of the front of the car.
[0117] Step 202, selecting a target area in the road ahead image.
[0118] combine Figure 7 As shown, after analyzing the road image collected by the vehicle-mounted machine vision sensor, according to the importance of the entire image for lane line recognition and its impact on subsequent image processing. The front area of the vehicle engine cover 3 and the area near an...
no. 3 example
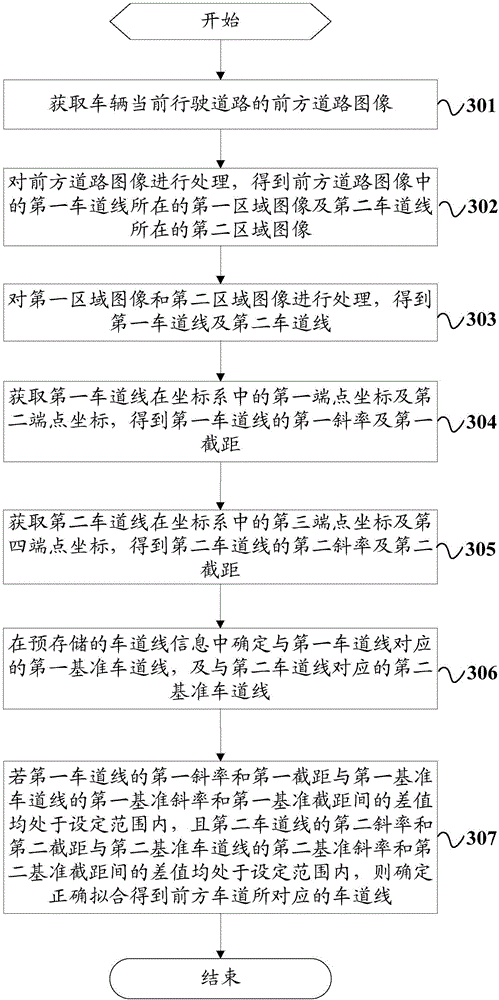
[0130] The embodiment of the present invention discloses a lane line recognition method, combining image 3 shown, including:
[0131] Step 301 , acquiring a road ahead image of the road the vehicle is currently traveling on.
[0132] The acquisition of the front road image can be collected by the camera device in the machine vision sensor in the car, specifically can be collected by installing a camera on the front of the car, and in order to make the machine vision sensor and the camera device can collect effective front road images , which is preferably set at the center of the front of the car.
[0133] In step 302, the image of the road ahead is processed to obtain a first area image where the first lane line is located and a second area image where the second lane line is located in the road ahead image.
[0134]Wherein, the first lane line is specifically the left lane line constituting the lane, the second lane line is the right lane line constituting the lane, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com