Unmanned plane lens
A camera lens and lens technology, applied in the field of optical lenses, can solve the problems of large distortion, poor sharpness and layering, and limited shooting frame of drone aerial photography lens, and achieve uniform color reproduction, good resistance to temperature changes, Good sharpness and layering effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
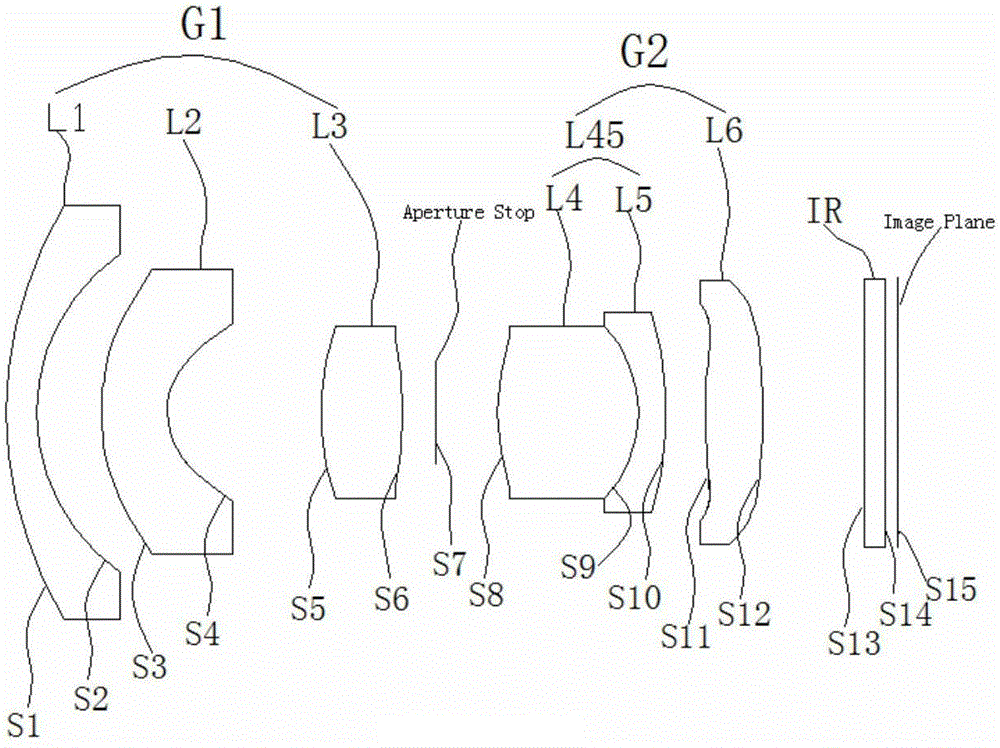
[0065] see Figure 1-Figure 8 and Figure 22 , the UAV lens, from the object side to the image side, includes a front lens group G1, an aperture stop Aperture Stop and a rear lens group G2, and the aperture stop is located in the middle of the lens, wherein the front lens group G1 includes a lens from the object The first lens L1 with a negative focal length, the second lens L2 with a negative focal length, and the third lens L3 with a positive focal length are arranged in sequence from side to image side. Each lens in the front lens group G1 has a convex surface facing the object side. The lens L1 and the second lens L2 are concave on the side facing the image surface, and the third lens L3 is convex on the side facing the image surface; the rear lens group G2 includes a fourth lens L4 with a positive focal length arranged sequentially from the object side to the image side , the fifth lens L5 with a negative focal length, and the sixth lens L6 with a positive focal length. ...
no. 2 example
[0104] see Figure 9-Figure 15 and Figure 23 , in this embodiment, when the working object distance WD=1m, the total focal length of the drone lens f=3.5mm, the aperture F#=2.85, the full field of view FOV=100°, the total lens length of the drone lens TL=25.1 mm,
[0105]
[0106]
[0107]
[0108] K A B C D E S3 1.7214 4.47E+03 -3.24E-04 2.11E-05 -9.68E-07 1.64E-08 S4 -0.6078 1.09E-02 -7.73E-04 1.46E-04 -2.11E-05 9.26E-05 S11 -9.575 -1.22E-04 -1.43E-04 -1.86E-06 2.44E-06 -1.36E-07 S12 -5.53E+10 2.10E-04 -2.63E-04 -3.57E-06 9.65E-07 -4.95E-08
[0109] n1+ln(v1) n2+v2 / 40.5 n3+v3 / 40.5 n6+v6 / 40.5 n5+ln(v5) 5.51 2.8 2.9 3.17 4.79
[0110] D1 / TL f / TL (D1+D2) / TL T1 / T2 T2 / T6 n4 / f4+0.05*v4 n5 / f5-0.045*v5 0.05 0.14 0.24 0.68 1.38 4.75 -1.06
[0111]
[0112]
[0113]In the above tables, n is the refractive index, R is the radius of curvature, ...
no. 3 example
[0116] see Figure 16-Figure 21 and Figure 24 , in this embodiment, when the working object distance WD=1m, the total focal length of the drone lens f=3.37mm, the aperture F#=2.82, FOV=100°, TL=25.1mm,
[0117]
[0118]
[0119] f1 / f2 f2 / f6 f1 / f6 fg1 / fg2 3.29 -0.59 -1.95 1.18
[0120]
[0121] K A B C D E S3 -0.3 2.51E-03 -3.17E-04 1.92E-05 -8.32E-07 1.61E-08 S4 -0.52 5.59E-03 -1.42E-03 1.42E-03 -1.99E-05 9.26E-07 S11 -16 1.80E-04 -3.24E-04 -1.14E-05 1.95E-06 -1.36E-07 S12 13 1.37E-03 -4.11E-04 5.49E-06 7.27E-07 -4.95E-08
[0122] n1+ln(v1) n2+v2 / 40.5 n3+v3 / 40.5 n6+v6 / 40.5 n5+ln(v5) 5.51 2.98 2.9 2.98 4.79
[0123] D1 / TL f / TL (D1+D2) / TL T1 / T2 T2 / T6 n4 / f4+0.05*v4 n5 / f5-0.045*v5 0.04 0.13 0.25 0.66 1.2 4.74 -1.11
[0124]
[0125]
[0126] The following is to list in the first embodiment to the third embodimen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com