Water-air amphibious glider capable of vertically taking-off, landing and flying
A vertical take-off and landing, glider technology, applied in the direction of aircraft, seaplanes, motor vehicles, etc., can solve the problems of poor maneuverability, affecting the range and activity range of drones, and low energy conversion efficiency of multi-rotor flight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with accompanying drawing.
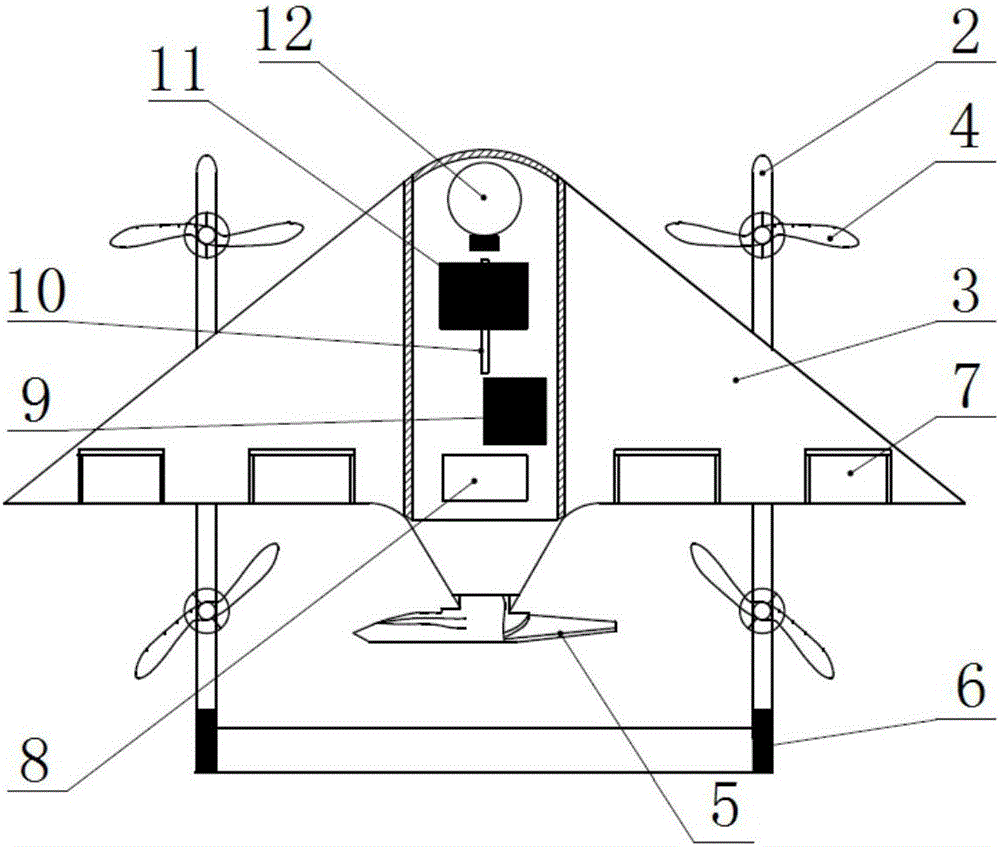
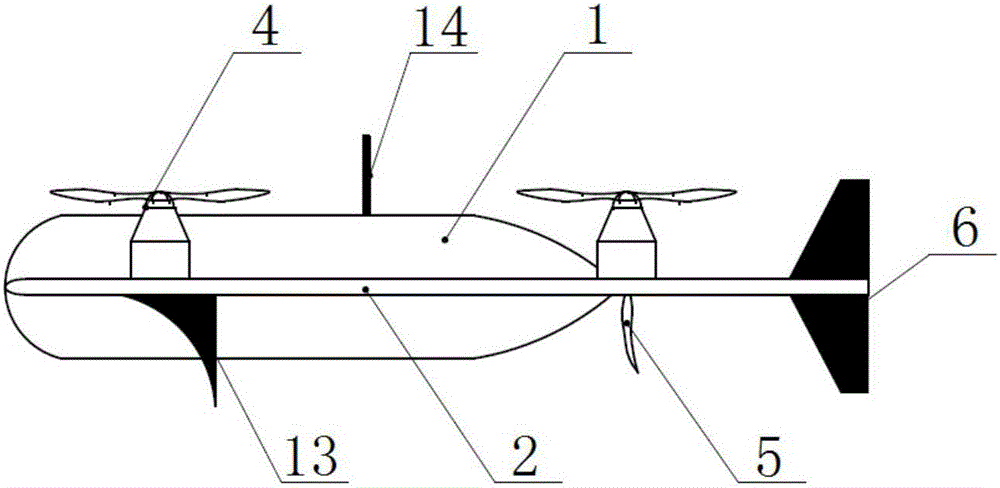
[0020] The water-air amphibious glider capable of vertical take-off and landing flight according to the present invention can glide in a large underwater range and fly in a wide range in the air, and can switch between the two working states at will. When the underwater glider floats horizontally on the water surface and needs to switch from water navigation to air flight, it will start the rotor 4 to rotate at a high speed and take off vertically. When it flies to a certain height, it will start the tail propeller 6 to propel the flight; When it is necessary to enter the water for observation from the air, it can vertically land on the water surface through the rotor 4, and then glide underwater through the roll adjustment mechanism 9, the pitch adjustment mechanism 11 and the buoyancy adjustment mechanism 12. When gliding in the water, the 6 blades of the tail propeller w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com