Sliding mode adaptive controller with built-in brushless DC motor current loop control for two-wheeled self-balancing robot
A sliding mode adaptive, brushed DC motor technology, applied in current controller, electronic commutation motor control, program control manipulator, etc., can solve the problems of unreasonable linear combination, large system chattering, danger, etc., and achieve effective control The effect of driving current size, improving lifespan and safe use, and ensuring safety and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
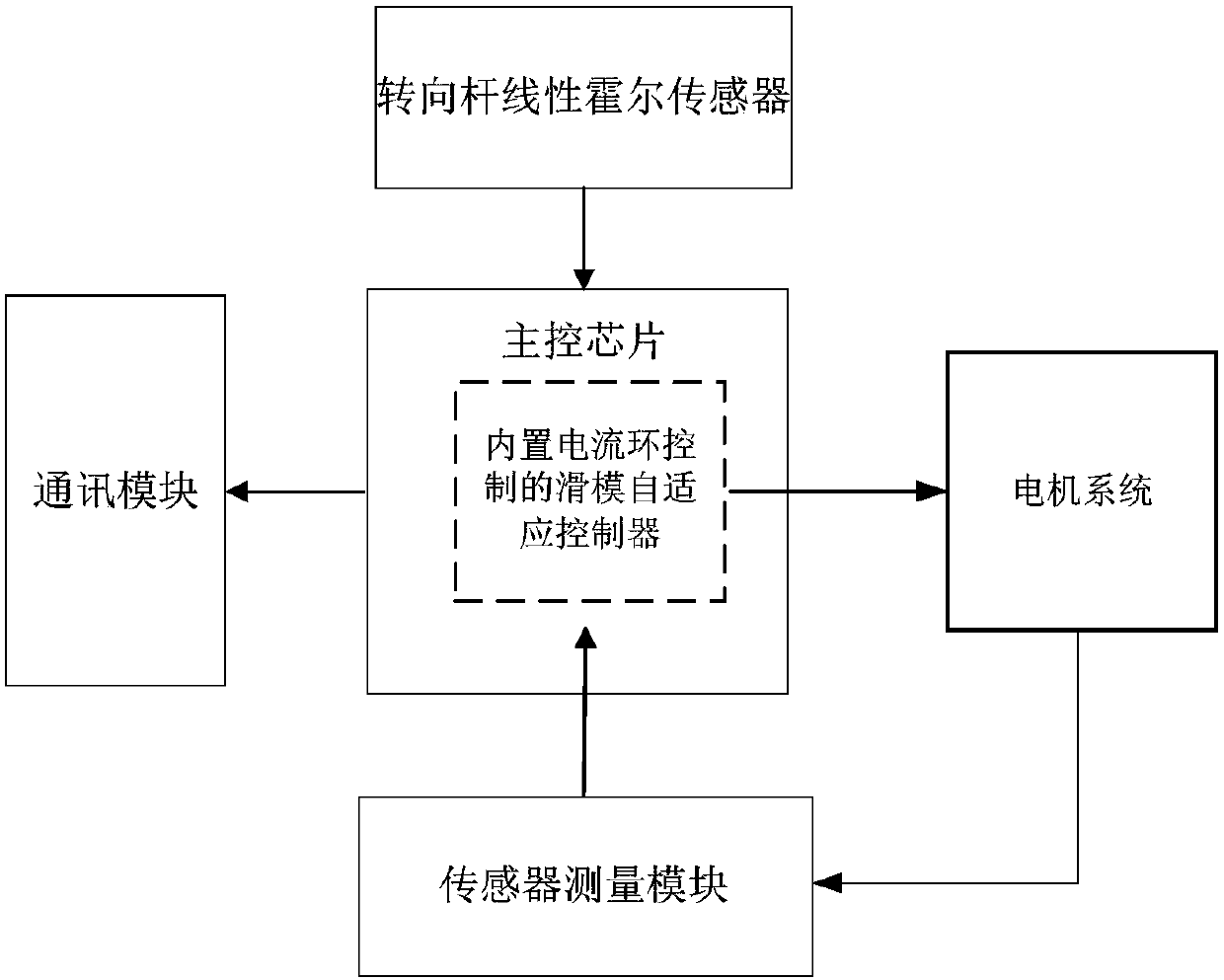
[0041] see figure 1 , shows a system block diagram of a sliding mode adaptive controller for a two-wheel self-balancing robot with a built-in brushless DC motor current loop control of the present invention, including a sensor measurement module, a main control chip, a communication module, and a steering rod linear Hall sensor And the motor system, wherein the sensor measurement module is used to collect the motion parameters of the self-balancing robot, including at least a gyroscope and an accelerometer, which are used to collect angular velocity signals and acceleration signals respectively, wherein the model of the gyroscope is L3G420D, and the model of the accelerometer is LSM303D; the motor system is used to drive the movement of the two-wheel self-balancing robot, the motor system is the power execution system of the two-wheel self-balancing robot, at least including the brushless motor and its drive circuit; the communication module adopts a serial communication module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com