UAV for underwater detection and cleaning based on quadrotor structure and its working method
An unmanned aerial vehicle and quadrotor technology, which is applied to the cleaning method using tools, underwater operation equipment, cleaning method and utensils, etc., can solve the problem of unsatisfactory cleaning effect, difficulty in controlling the size of water pressure, and easy damage to walls problem, to achieve high stability, convenient testing, low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
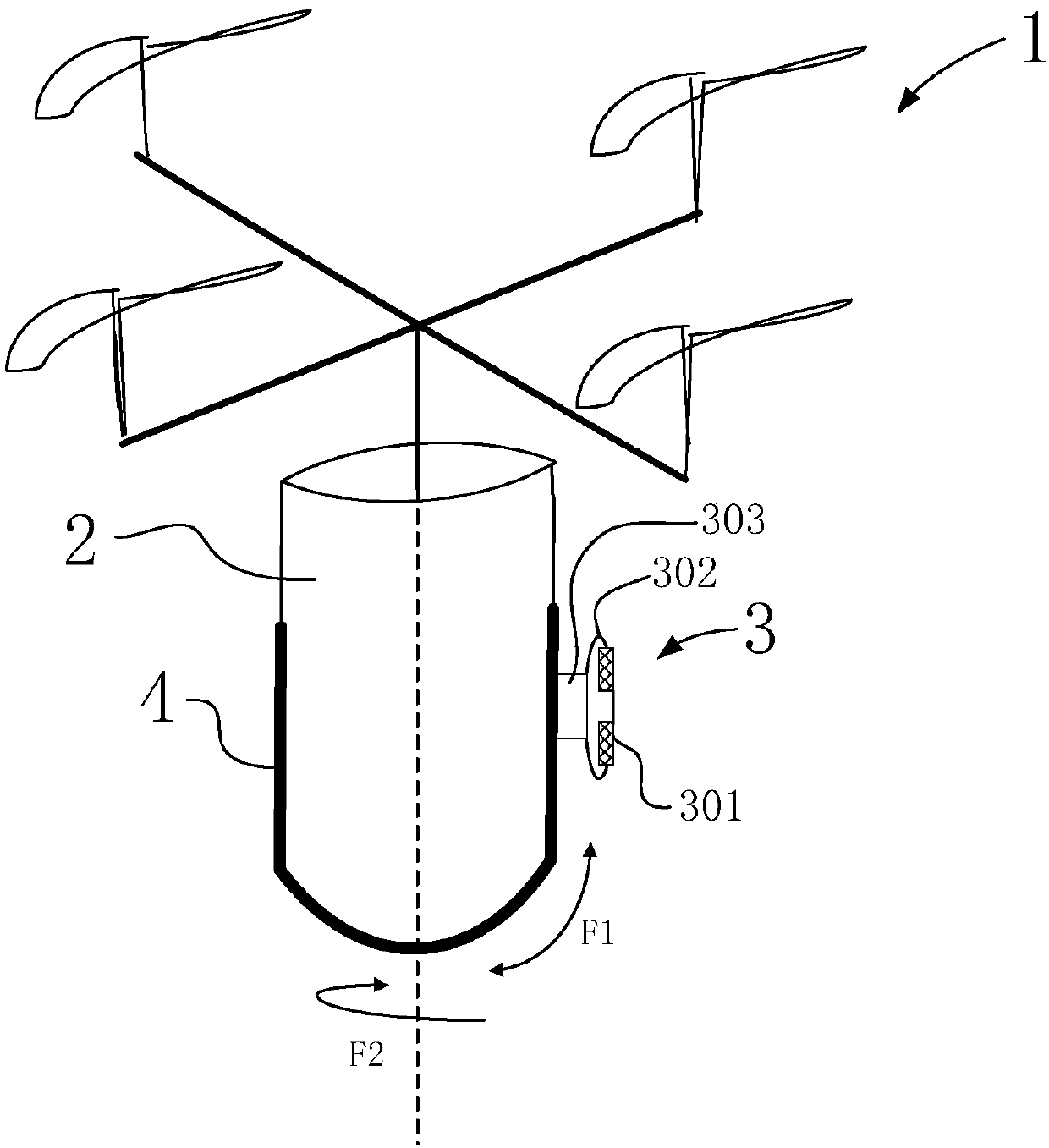
[0029] Such as figure 1 As shown, the present embodiment 1 provides an underwater unmanned aerial vehicle, comprising: a fuselage body 2 with four rotor blades 1, the fuselage body 2 carries a cleaning device 3, through which the cleaning device 3 is suitable for Clean the underwater scene.
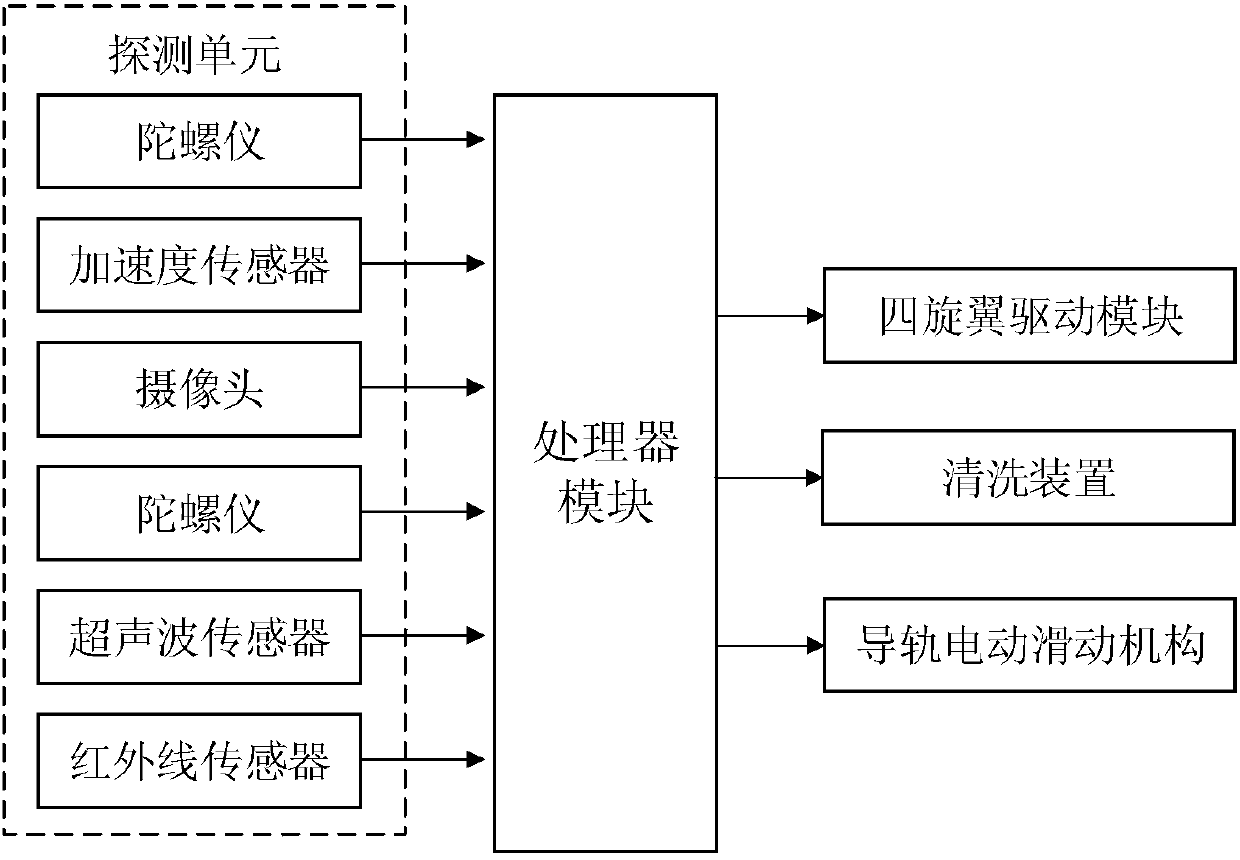
[0030] The fuselage body 2 is provided with a processor module and a detection unit; wherein the detection unit includes a gyroscope, an acceleration sensor, a camera, an ultrasonic sensor and an infrared sensor connected to the processor module; and the processor module is also connected to the processor module. The quadrotor drive module is connected.
[0031] The processor module is suitable for identifying the pollutants attached to the underwater scene through the video data collected by the camera; the video data can also be sent to the upper computer for identification through wireless means, or manually identified.
[0032] The processor module is also suitable for avoiding the ...
Embodiment 2
[0041] On the basis of embodiment 1, this embodiment 2 also provides a working method of the underwater drone.
[0042] The working method of described underwater unmanned aerial vehicle comprises the steps:
[0043] Step S1, identifying pollutants attached to the underwater scene; and
[0044] Step S2, adjusting the posture to clean the pollutants.
[0045] Described underwater drone is as described in embodiment 1.
[0046]If a pothole area is identified, and pollutants are attached to the pothole area; the four-rotor blade 1 is suitable for controlling the fuselage body 2 to extend into the pothole area, and the processor module controls the cleaning device 3 along the guide rail 4 and in the pothole area The surface is washed back and forth, and while cleaning the surface of the pothole area, the four-rotor blade 1 is suitable for driving the fuselage body 2 to rotate at a constant speed, so as to form a spiral cleaning track in the pothole area and improve the cleaning ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com