Method for autonomous navigation and positioning underwater
An autonomous navigation and pose technology, applied in navigation computing tools and other directions, can solve problems such as complex calculations, low data association accuracy, and insufficient prior information, and achieve the effect of improving computing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further explained below in conjunction with the accompanying drawings.
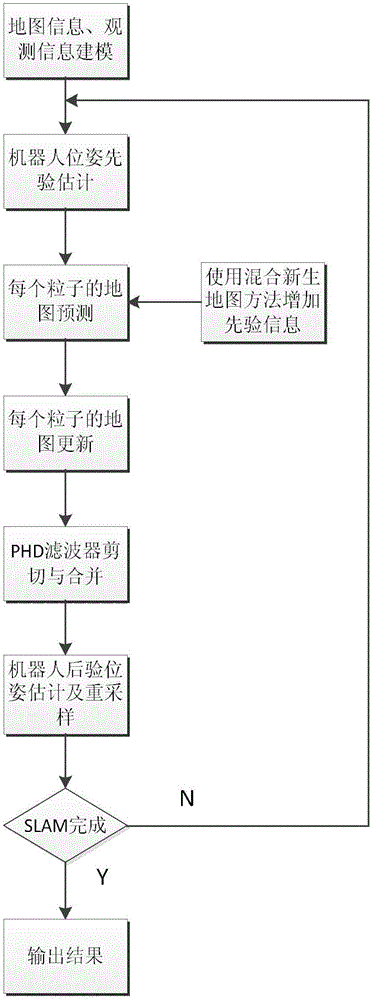
[0023] Such as figure 1 As shown, a method for underwater autonomous navigation and positioning disclosed by the present invention mainly includes the following steps:
[0024] Step 1. Model the feature information of the map at time k fed back by the robot, the observation information of the map feature, and the probability of missed detection caused by sensor uncertainty into a random finite set form. The number of map feature sets varies from zero to arbitrary size, and increases monotonously with the map features that appear in the robot's field of vision continuously, and each map feature is independent of each other.
[0025] M = φ (no map features)
[0026] M={m 1}(a state is m 1 map features)
[0027] M={m 1 ,m 2}(two map features m 1 ≠m 2 )
[0028] M={m 1 ,...,m n}(n map features m 1 ≠...≠m n )
[0029] In the SLAM process, the map feature obse...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com