Motion planning method for additional shafts in working units of gantry hoisting robot
A work unit and motion planning technology, which is applied in the direction of manipulators, manufacturing tools, program control manipulators, etc., can solve the problems of large range of robot joint changes, and achieve the effect of improving work adaptability, reducing joint changes, and continuous and stable motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The following takes the Fanuc 1-M-20iA model robot as an example, and the embodiments of the present invention are described in detail with reference to the accompanying drawings.
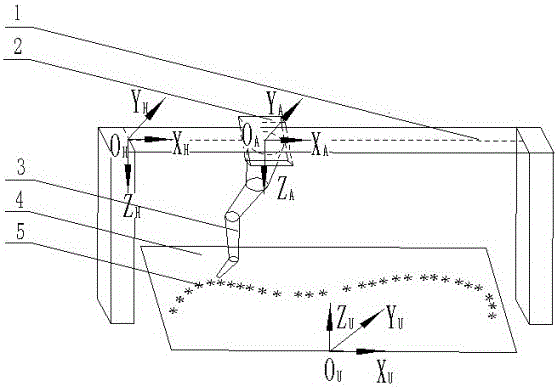
[0032] Such as figure 1 As shown, the gantry hoisting robot working unit is composed of linear guide 1, sliding table 2, industrial robot 3, work table 4, and processing track point 5.
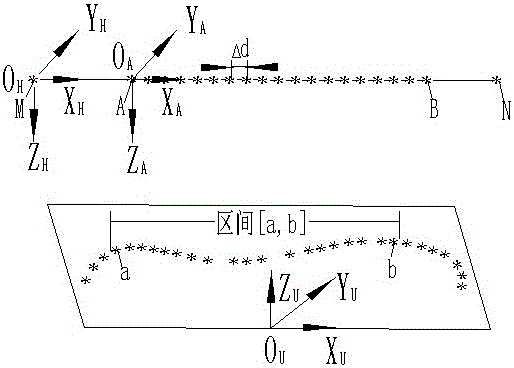
[0033] Such as figure 2 As shown, an additional axis motion planning method in a gantry hoisting robot work unit, the additional axis includes a linear guide rail and a sliding table, and includes the following steps:
[0034] The first step: such as image 3 As shown, the user coordinate system {O U X U Y U Z U }; Establish the guideway zero point coordinate system at the linear guideway zero point M {O H X H Y H Z H }, OX axis direction is the movement direction of the sliding table (that is, the axis direction of the guide rail); the sliding table coordinate system is established at the center of the lower...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com