Face detection and tracking method, robot head rotation control method, and robot
一种人脸检测、头部转动的技术,应用在人脸识别领域,能够解决机器人头部转动过程不精准、检测人脸误检测率高、非人脸检测成人脸等问题,达到保障流畅性、保障连续性、降低误检测率的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
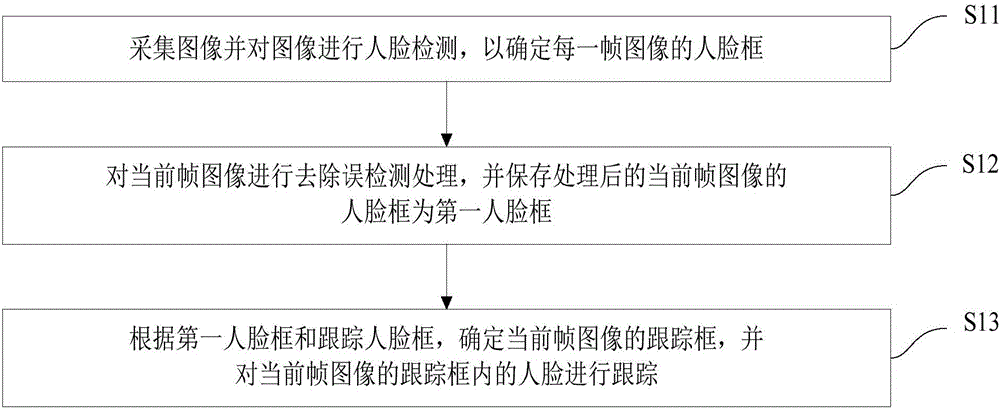
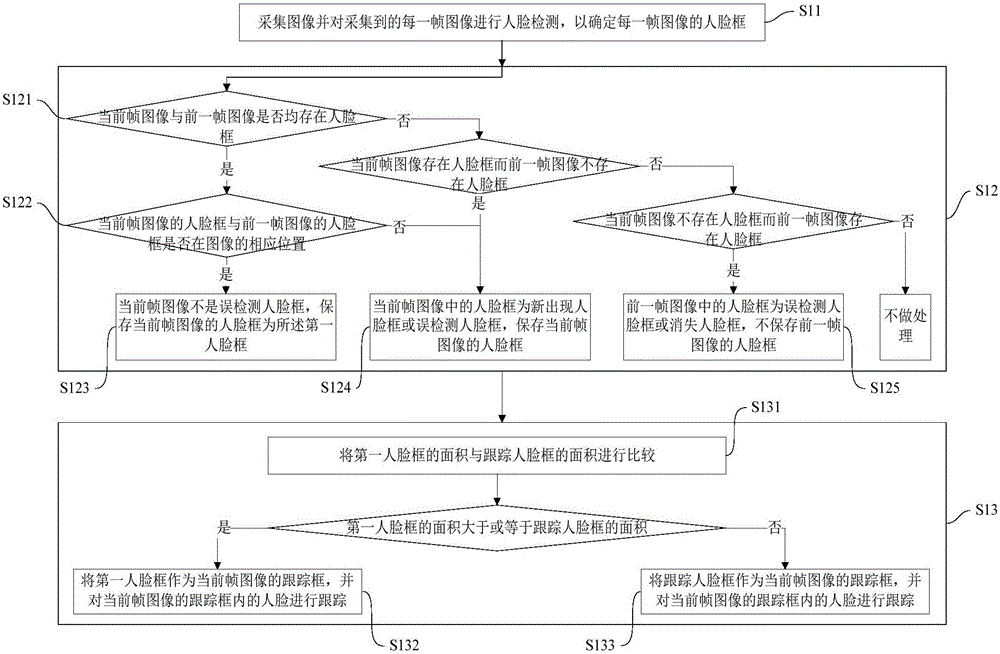
[0048] figure 1 and figure 2 The face detection and tracking method in this embodiment is shown. The face detection and tracking method includes:
[0049] S11: Face detection step: collecting images and performing face detection on each frame of the collected images, so as to determine a face frame of each frame of images. In this embodiment, the Viola-Jones face detection algorithm is used to perform face detection on each frame of images collected. The Viola-Jones algorithm uses integral images to extract image feature values, which improves the speed of face detection to a certain extent. At the same time, the Viola-Jones algorithm uses the feature screening features of the Adaboost classifier to retain the most useful features, reduce the computational complexity of detection, and make human detection faster. In addition, the Viola-Jones algorithm transforms the Adaboost classifier into a cascaded Adaboost classifier to improve the accuracy of face detection. It can ...
Embodiment 2
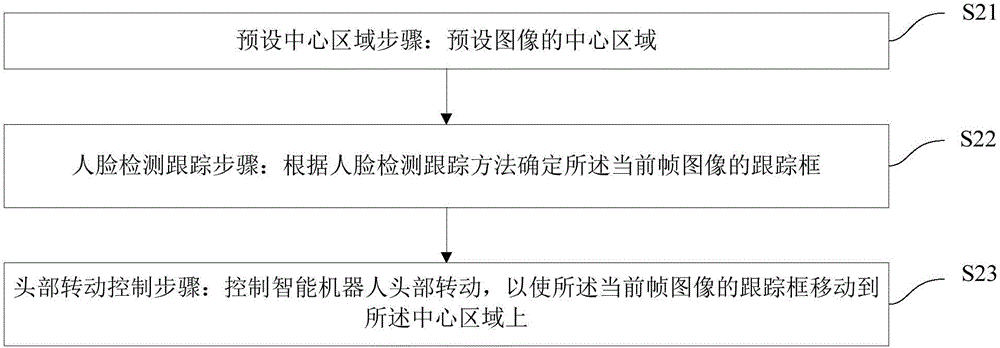
[0069] image 3 The head rotation control method of the robot in this embodiment is shown. Among them, the robot has built-in camera equipment for collecting images. The head rotation control method of the robot comprises the following steps:
[0070] S21: Presetting the central area Step: Presetting the central area of the image. Such as Figure 4 As shown, the lower left corner of the current frame image is the origin O to establish a coordinate system OXY, the width of the preset image is w, and the height is h; if the width of the central area of the preset image is 0.1w, the height is 0.1h; Assuming that the center of the central area of the image is located at the center of the preset image, the coordinates of the center A of the central area of the preset image are (0.5w, 0.5h). Correspondingly, the coordinates of the lower left corner of the central area are (0.45w, 0.45h), the coordinates of the upper left corner are (0.45w, 0.55h), the coordinates of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com