A virtual visualization control method and system for robot transportation
A control method and robot technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the problem that robots cannot perform synchronous visual simulation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
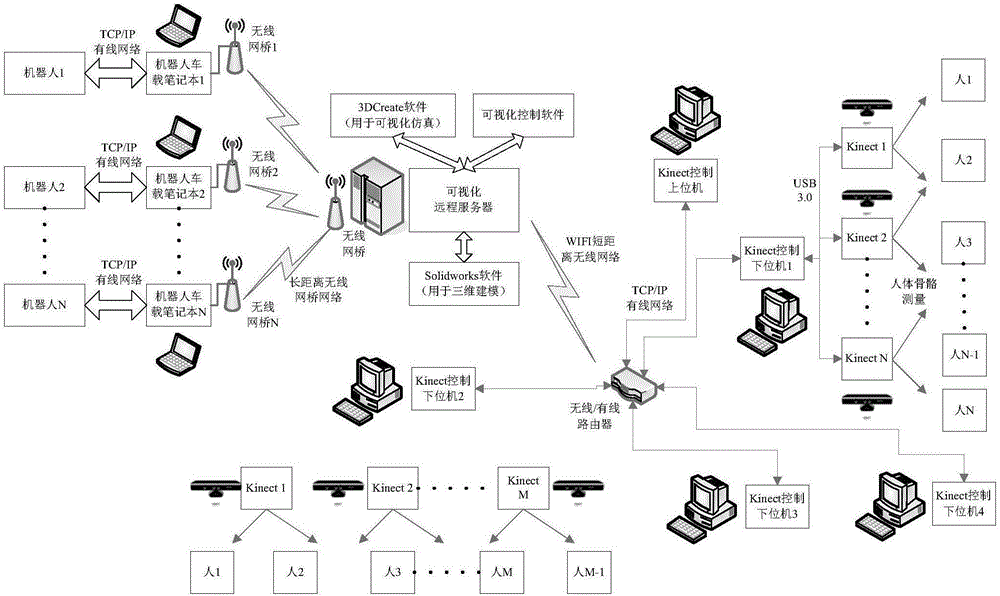
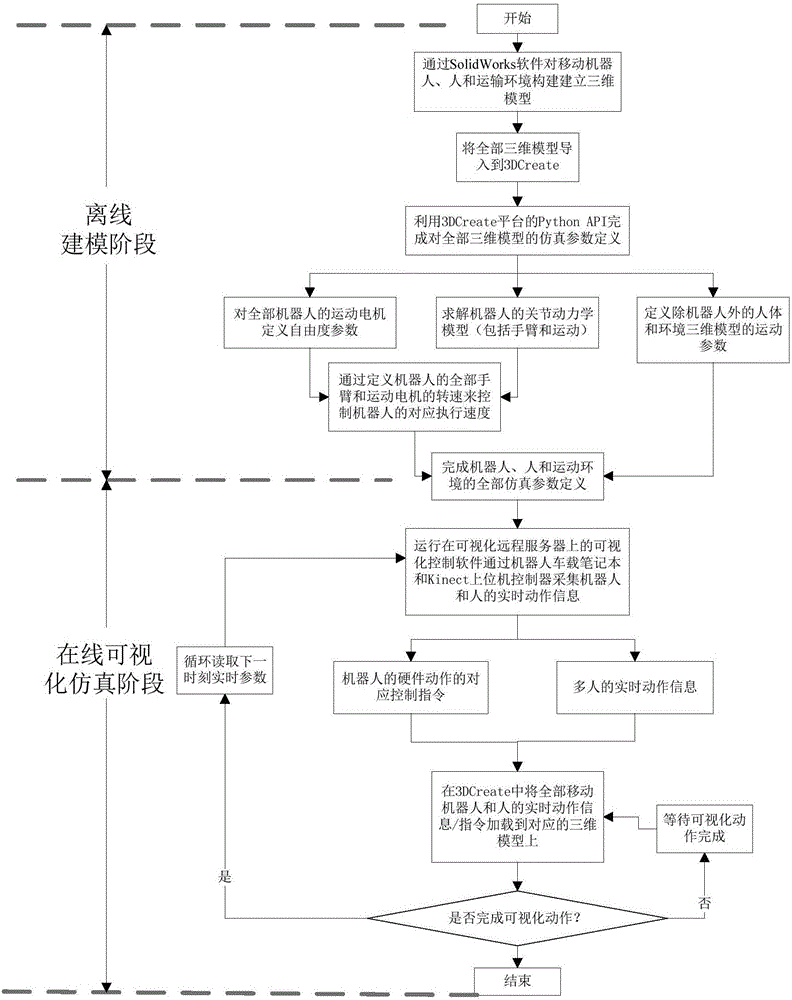
[0032] For the general visualization system, only the visualization simulation is realized on the software. Generally, it can only be used for publicity and has no actual function. In the field of robot transportation, when designing various complex robot transportation solutions, designers very much hope to have a platform that can not only visually simulate the independent actions of each robot, but also hope that the effect of the entire robot transportation can be simulated. Visual simulation. For example, look at how many times it takes the robot to complete all the multi-floor transportation tasks, whether the robot will collide with people coming in front when it runs at a certain speed, and so on. In order to realize this kind of real visual simulation, it is necessary to read the actual hardware parameters of the visualized object in real tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com