Intelligent obstacle avoidance robot
An intelligent obstacle avoidance and robot technology, applied in the field of intelligent robots, can solve problems such as disorder, complex obstacle layout, unstable movement, etc., to achieve the effect of improving detection ability and easy communication and interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] The driving wheel 430 is driven by a DC motor 436, and the DC motor 436 has a built-in photoelectric speed measurement module. In this embodiment, the use of a DC motor with a photoelectric speed measurement module can precisely control the rotation of the robot's wheels, which is conducive to precise control of the rotation of the robot's wheels, and achieves the purpose of the robot's smooth movement and accurate turning.
Embodiment 2
[0040] There are two counterweights 401 between the two driving wheels 430 , which are respectively located inside the two driving wheels 430 , close to the bottom front of the robot chassis 400 . In this embodiment, the distributed distribution of counterweights is beneficial to ensure that the robot maintains a lower center of gravity.
Embodiment 3
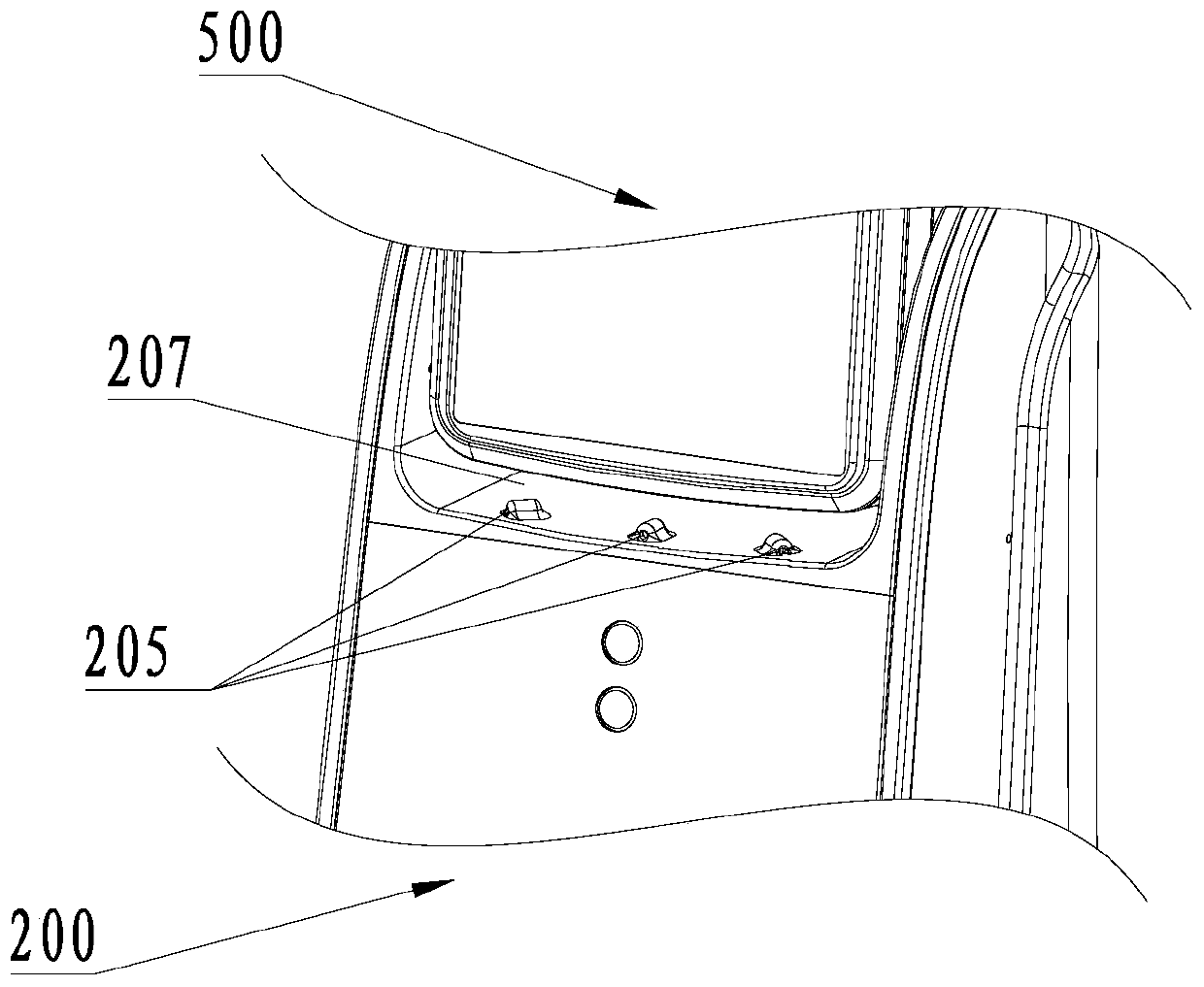
[0042] see Figure 5 , the bottom of the robot chassis 400 is provided with a groove 406 corresponding to the mounting position of the counterweight 401, and a cylindrical accommodation cavity 407 is formed in the groove 406, and the counterweight 401 is installed in the accommodation cavity 407, A cover plate 405 is provided corresponding to the groove 406, and the cover plate 405 is fixed to the groove 406 by screws. In this embodiment, the setting of the groove can prevent the counterweight from moving in the horizontal direction and eliminate the possibility of the counterweight colliding with other parts of the body. The cylindrical counterweight is easier to determine the center of gravity and reduces the difficulty of counterweight structure design. Adding a cover plate to the groove can prevent the bumps generated when the robot moves, causing the counterweight to move up and down and interfere with the smooth movement of the robot.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com